Theory of operation, System overview, Beacon plane – Ditch Witch 8500 User Manual
Page 51
Tracking Concepts - 48
8500 Tracking System Operator’s Manual
Theory of Operation
CMW
Theory of Operation
System Overview
The 8500 tracking system uses a magnetic field generator in an 850 series beacon and two receiving
antenna pods in an 8500TK advanced tracker to determine beacon position. The tracker detects the
generated magnetic field and calculates the beacon’s position. Downhole information is relayed from the
beacon to the tracker. The tracker sends all received and calculated data to a remote display over a radio
link.
The dual antenna pod design provides the ability to approach the beacon location without encountering
ghost signals and can determine the beacon’s location and heading. When placed along the intended bore
path, the tracker can be used in Drill-Thru mode to provide the beacon’s current depth, projected depth at
the tracker location, horizontal distance (range) and horizontal steering correction.
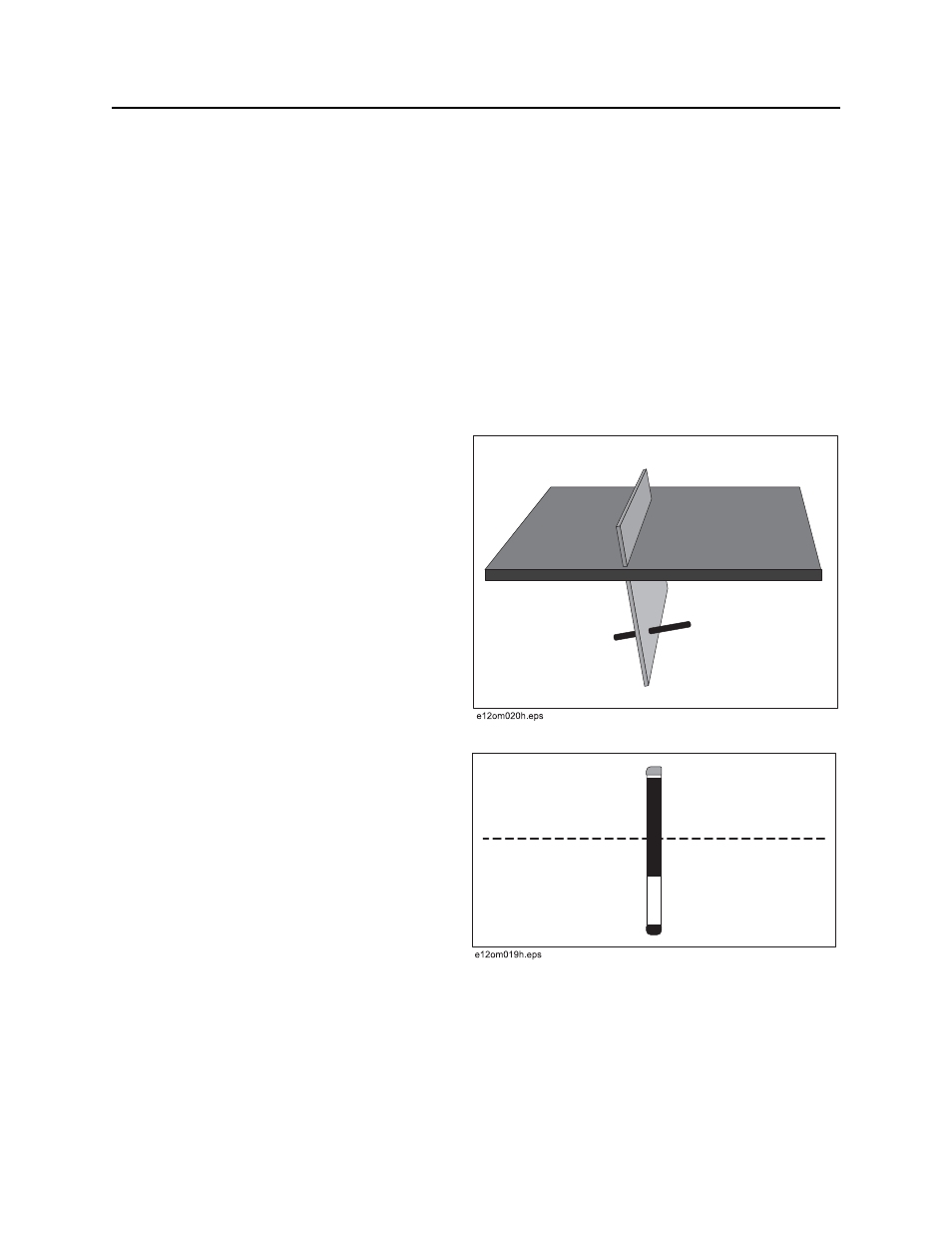
Beacon Plane
The 8500TK locates the beacon plane
perpendicular to the center of the beacon. Once
the tracker is within range of the beacon and within
the beacon plane, the advanced depth calculations
of the tracker are enabled.
The beacon plane extends outward from the center
of the beacon and runs perpendicular to the
beacon as shown. Because of this, the ground
level location may be slightly in front of or behind
the true vertical position of the beacon’s center.
This is only apparent at extreme pitches and
increasing depths. For example, at 30’ (9 m) deep
and 10% pitch, the beacon plane and vertical plane
will be approximately 3’ (914 mm) apart at ground
level. The tracker calculates this difference and
presents it in the depth mode side view.
Beacon plane: side view
Beacon plane: top view