Delta Electronics Network Device none User Manual
Page 2
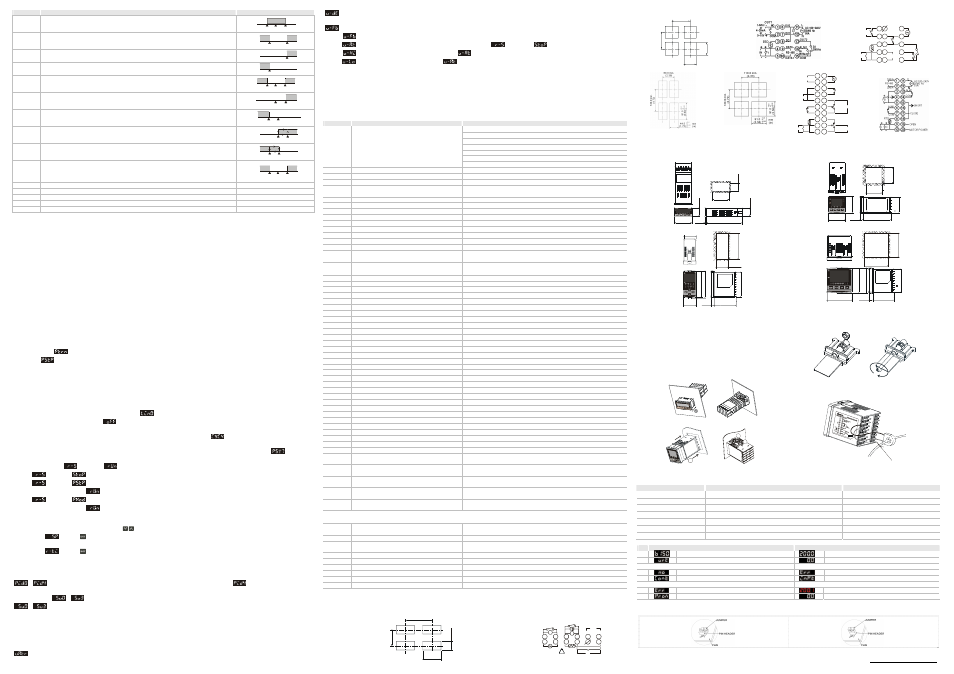
Set Value
Alarm Type
Alarm Output Operation
4
Reverse deviation upper- and lower-limit:
This alarm output operates when PV value is in the range of the setting value SV+(AL-H)
and the setting value SV-(AL-L).
ON
OFF
SV
SV-(AL-L)
SV+(AL-H)
5
Absolute value upper- and lower-limit:
This alarm output operates when PV value is higher than the setting value AL-H or lower
than the setting value AL-L.
ON
OFF
AL-L
AL-H
6
Absolute value upper-limit:
This alarm output operates when PV value is higher than the setting value AL-H.
ON
OFF
AL-H
7
Absolute value lower-limit:
This alarm output operates when PV value is lower than the setting value AL-L.
ON
OFF
AL-L
8
Deviation upper- and lower-limit with standby sequence:
This alarm output operates when PV value reaches set point (SV value) and the value is
higher than the setting value SV+(AL-H) or lower than the setting value SV-(AL-L).
ON
OFF
SV
SV-(AL-L)
SV+(AL-H)
9
Deviation upper-limit with standby sequence:
This alarm output operates when PV value reaches set point (SV value) and the reached
value is higher than the setting value SV+(AL-H).
SV+(AL-H)
ON
OFF
SV
10
Deviation lower-limit with standby sequence:
This alarm output operates when PV value reaches the set point (SV value) and the
reached value is lower than the setting value SV-(AL-L).
SV-(AL-L)
ON
OFF
SV
11
Hysteresis upper-limit alarm output:
This alarm output operates if PV value is higher than the setting value SV+(AL-H). This
alarm output is OFF when PV value is lower than the setting value SV+(AL-L).
ON
OFF
AL-L AL-H
12
Hysteresis lower-limit alarm output:
This alarm output operates if PV value is lower than the setting value SV-(AL-H). This
alarm output is OFF when PV value is higher than the setting value SV-(AL-L).
ON
OFF
AL-H AL-L
13
CT alarm output:
This alarm operates when the current measured by transformer (CT) is lower than AL-L or
higher than AL-H (This alarm output is available only for the controller with current
transformer).
ON
OFF
AL-L
SV
AL-H
14
When program control is end status, alarm output is ON.
15
When RAMP UP status happens to PID program control, alarm output is ON.
16
When RAMP DOWN status happens to PID program control, alarm output is ON.
17
When SOAK status happens to PID program control, alarm output is ON.
18
When RUN status happens to PID program control, alarm output is ON.
Note: AL-H and AL-L include AL1H, AL2H, AL3H and AL1L, AL2L, AL3L
Current Transformer (CT) Function
The Current Transformer (CT) function is used with the alarm output. When using a current transformer (CT) with the
controller, change the corresponding alarm output mode to mode 13 (alarm output set value is 13), then turn to operation
mode and set the current lower-limit and current upper-limit. You can set current alarm range between 0.5A ~ 30A, display
resolution is 0.1A and measure accuracy is +/- 0.5A.
EVENT Inputs Function
There are two optional event inputs (contact inputs) supported (EVENT1and EVENT2) in DTB series.
EVENT1 : RUN/STOP operation can be executed by RUN/STOP parameters (Operation Mode) or via the communication.
User also can control RUN/STOP operation by EVENT 1 in DTB series. The control output is ON if the circuit of EVENT 1
is open when the controller is operating. Otherwise, the controller will stop output if the circuit of EVENT 1 is short or when
the system parameter of the controller is set to STOP mode.
EVENT2 : DTB series allows user can switch two temperature setting value by changing the status (open/short) of EVENT
2. Each temperature setting value has independent control parameters.
PID Program Control (Ramp/Soak Program Control)
Description of Function and Parameters Setting:
PID program control by 8 patterns (Pattern No. 0~7) is supported in DTB series. Each pattern contains 8 steps (step No. 0
~ 7), one Link Pattern parameter, one Cycle parameter and one Actual Step parameter
Start Pattern :
is in operation mode and it is used to set the Start Pattern of PID program control (This parameter
appear in
mode only).
Steps : Include set point X and execution time T, these two parameters setting. The set point (SV) should reach
temperature X after the period of execution time T. If the set point is the same as the result of the previous setting, then it is
called Soak program control. If not, then it is called Ramp program control. Therefore, PID program control is also called
Ramp/Soak program control.
The default of step No. 0 in this controller is Soak program control. The controller will control the temperature (PV) to
reach the set point X and then keep the temperature at set point X. The period of execution time is time T which provided
by step No. 0.
Link Pattern Parameter : For example, when set
to 2, it indicates that pattern No. 2 will execute next after the
execution of pattern No. 0. If set to
, it indicates the program will stop after executing the current pattern and the
temperature will keep at the set point of the last step.
Cycle Parameter : Additional execution cycle number. For example, when set
to 2, it indicates that pattern No. 4
should execute twice in addition. Include origin one time execution, total execute three times.
Actual Step Parameter : Execution step number per pattern (can set to 0 ~ 7). For example, when set
to 2, it
indicates that pattern No 7 will not execute other steps than step 0 to step2.
Execution : When
is set to
, the program will start to execute in order from the step 0 of start pattern.
When
is set to
, the program will stop and the control output is disabled.
When
is set to
, the program will stop and the temperature at that time will be controlled at the set point
before program stop. Select
again, then the program will restart and execute from step 0 of start pattern.
When
is set to
, the program will hold and the temperature at that time will be controlled at the set point
before program hold. Select
again, then the program will follow the step before hold and start to execute through
the rest of the time.
Display : During PID program control, the SV default display is P-XX, P indicates the current execution pattern and XX
indicates the current execution step. Press
to change the display item.
After select
, press
key, and then the temperature set point of the current execution step will display on SV
display.
After select
, press
key, and then the residual time of the current execution step will display on SV display.
PID Control
One group can be selected from any one of 4 groups PID parameters (P, I, D, IOF) for PID control. After AT, PID value and
temperature setting will be stored in the selected one group.
~
: PIDn, n = 0 ~ 4 from which 0 ~ 3 correspond to each PID parameter.
: n = 4, auto PID parameter.
Program will automatically select a most useful PID parameter based on current temperature setting. Displayed SV values
correspond to
~
~
: Temperature setting corresponded to the selected PID parameter via user-defined or AT.
Valve Control:
When use valve control as output control, there are 2 Relay outputs for motor forward/reverse control, one (output 1) for
valve open the other (output 2) for valve close. The output volume is controlled by valve open/close and it can be set with
feedback function enabled or disabled. When feedback is disabled, output 1 will keep output while valve fully opens and
output 2 will keep output while valve fully closes. But if feedback is enabled, please follow the parameter setting for valve
control as follows:
: Time for valve from full close to full open.
: Dead Band setting of valve. The value of current valve output minus previous one must be greater than Dead Band
value; otherwise, valve will remain OFF.
: Signal feedback setting, ON for enabling feedback and OFF for disabling feedback.
When
set to ” 1”, it means signal feedback function is activated and will come up selections as follows:
a.
: Upper/Lower limit of valve feedback by auto-tuning.
must set to
for showing up this selection.
b.
: D/A value when value fully opens. Set
to be ”1” for auto setting or ”0” for manual setting.
c.
: D/A value when value fully closes. Set
to be ”1” for auto setting or “0” for manual setting.
Note: If feedback function setting is with problem, program will see the setting as feedback disabled.
RS-485 Communication
1. Supporting transmission speed: 2,400, 4,800, 9,600, 19,200, 38,400bps
2. Non-supported formats: 7, N, 1 or 8, O, 2 or 8, E, 2
3. Communication protocol: Modbus (ASCII or RTU)
4. Function code: 03H to read the contents of register (Max. 8 words). 06H to write 1 (one) word into register. 02H to read
the bits data (Max. 16 bits). 05H to write 1 (one) bit into register.
5. Address and Content of Data Register:
Address
Content
Explanation
Measuring unit is 0.1, updated one time in 0.4 second
The following reading value display indicates error occurs:
8002H : Initial process (Temperature value is not got yet)
8003H : Temperature sensor is not connected
8004H : Temperature sensor input error
8006H : Cannot get temperature value, ADC input error
1000H
Process value (PV)
8007H : Memory read/write error
1001H
Set point (SV)
Unit is 0.1,
o
C or
o
F
1002H
Upper-limit of temperature range
The data content should not be higher than the temperature range
1003H
Lower-limit of temperature range
The data content should not be lower than the temperature range
1004H
Input temperature sensor type
Please refer to the contents of the “Temperature Sensor Type and
Temperature Range” for detail
1005H
Control method
0: PID, 1: ON/OFF, 2: manual tuning, 3: PID grogram control
1006H
Heating/Cooling control selection
0: Heating, 1: Cooling, 2: Heating/Cooling, 3: Cooling/Heating
1007H
1st group of Heating/Cooling control cycle
0 ~ 99, 0:0.5 sec
1008H
2nd group of Heating/Cooling control cycle
0 ~ 99, 0:0.5 sec
1009H
PB Proportional band
0.1 ~ 999.9
100AH
Ti Integral time
0 ~ 9,999
100BH
Td Derivative time
0 ~ 9,999
100CH
Integration default
0 ~ 100%, unit is 0.1%
100DH
Proportional control offset error value, when Ti = 0 0 ~ 100%, unit is 0.1%
100EH
The setting of COEF when
Dual Loop output
control
are used
0.01 ~ 99.99
100FH
The setting of Dead band when
Dual Loop
output control
are used
-999 ~ 9,999
1010H
Hysteresis setting value of the 1st output group
0 ~ 9,999
1011H
Hysteresis setting value of the 2nd output group
0 ~ 9,999
1012H
Output value read and write of Output 1
Unit is 0.1%, write operation is valid under manual tuning mode only.
1013H
Output value read and write of Output 2
Unit is 0.1%, write operation is valid under manual tuning mode only.
1014H
Upper-limit regulation of analog linear output
1 Unit = 2.8uA (Current Output) = 1.3mV (Linear Voltage Output)
1015H
Lower-limit regulation of analog linear output
1 Unit = 2.8uA (Current Output) = 1.3mV (Linear Voltage Output)
1016H
Temperature regulation value
-999 ~ +999, unit: 0.1
1017H
Analog decimal setting
0 ~ 3
1018H
Time for valve from full open to full close
0.1 ~ 999.9
1019H
Dead Band setting of valve
0 ~ 100%; unit: 0.1%
101AH
Upper-limit of feedback signal set by valve
0 ~ 1,024
101BH
Lower-limit of feedback signal set by valve
0 ~ 1,024
101CH
PID parameter selection
0 ~ 4
101DH
SV value corresponded to PID value
Only valid within available range, unit: 0.1 scale
1020H
Alarm 1 type
Please refer to the contents of the “Alarm Outputs” for detail
1021H
Alarm 2 type
Please refer to the contents of the “Alarm Outputs” for detail
1022H
Alarm 3 type
Please refer to the contents of the “Alarm Outputs” for detail
1023H
System alarm setting
0 : None (default), 1~3 : Set Alarm 1 to Alarm 3
1024H
Upper-limit alarm 1
Please refer to the contents of the “Alarm Outputs” for detail
1025H
Lower-limit alarm 1
Please refer to the contents of the “Alarm Outputs” for detail
1026H
Upper-limit alarm 2
Please refer to the contents of the “Alarm Outputs” for detail
1027H
Lower-limit alarm 2
Please refer to the contents of the “Alarm Outputs” for detail
1028H
Upper-limit alarm 3
Please refer to the contents of the “Alarm Outputs” for detail
1029H
Lower-limit alarm 3
Please refer to the contents of the “Alarm Outputs” for detail
102AH
Read LED status
b0 : Alm3, b1: Alm2, b2: F, b3: ℃, b4: Alm1, b5: OUT2, b6: OUT1, b7: AT
102BH
Read pushbutton status
b0 : Set, b1 : Select, b2 : Up, b3 : Down. 0 is to push
102CH
Setting lock status
0 : Normal, 1 : All setting lock, 11 : Lock others than SV value
102DH
CT read value
Unit: 0.1A
102FH
Software version
V1.00 indicates 0x100
1030H
Start pattern number
0 ~ 7
1040H~
1047H
Actual step number setting inside the correspond
pattern
0 ~ 7 = N, indicate that this pattern is executed from step 0 to step N
1050H~
1057H
Cycle number for repeating the execution of the
correspond pattern
0 ~ 99 indicate that this pattern has been executed for 1 ~ 100 times
1060H~
1067H
Link pattern number setting of the correspond
pattern
0 ~ 8, 8 indicates the program end. 0~7 indicates the next execution
pattern number after executing the current pattern
2000H~
203FH
Pattern 0~7 temperature set point setting
Pattern 0 temperature is set to 2000H ~ 2007H
-999 ~ 9,999
2080H~
20BFH
Pattern 0~7 execution time setting
Pattern 0 time is set to 2080H~2087H
Time 0 ~ 900 (1 minute per scale)
6. Address and Content of Bit Register: ( First bit of reading will put into LSB, Write data = FF00H for bit set, 0000H for bit
clear)
0810H
Communication write-in selection
Communication write in disabled: 0 (default), Communication write in
enabled: 1
0811H
Temperature unit display selection
o
C/linear input (default): 1 ,
o
F : 0
0812H
Decimal point position selection
Except for the thermocouple B, S, R type, all the other thermocouple
type are valid. (0 or 1)
0813H
AT setting
OFF: 0 (default), ON : 1
0814H Control
RUN/STOP
setting
0: STOP, 1: RUN (default)
0815H
STOP setting for PID program control
0: RUN (default), 1: STOP
0816H
Temporarily STOP for PID program control
0: RUN (default), 1: Temporarily STOP
0817H
Valve feedback setting status
0: w/o feedback (default), 1: feedback function
0818H
Auto-tuning valve feedback status
0: Stop AT (default), 1: Start AT
7. Communication Transmission Format: Command Code:02:read N bits,05:write 1 bit,03:read N words,06:write 1 word.
Panel Cutout & Terminal Definitions
Panel Cutout (dimensions are in millimeter and inch)
Terminals Definitions
DTB4824
65.0 min.
(2.56)
4
0
.0
m
in
.
(1
.5
8
)
44.8
(1.76)
2
2
.0
(0
.8
7
)
+0.6
-0
+0.02
-0
+
0
.6
-0 +
0
.0
2
-0
mm
(in)
DTB4824
1
4
3
2
5
6
AC 100~240V
50/60 Hz 5VA
Tc
+
-
RTD
OUT 1
DATA-
DATA+
RS-485
7
9
8
10
11
12
V
!
+
+
-
-
OUT 2/
ALM
V
+
-
IN
+
-
L
N
DTB4848
65.0 min.
(2.56)
4
5
.0
(1
.7
7
)
45.0
(1.77)
6
0
.0
m
in
.
(2
.3
6
)
+0.6
-0
+0.02
-0
+
0
.6
-0 +
0
.0
2
-0
mm
(in)
DTB4848
(EVENT & CT selection)
DTB4848
(NO EVENT & CT)
1
4
3
2
5
Tc
+
-
RTD
7
6
9
8
10
14V
DC
DATA-
DATA+
RS-485
11
14
15
13
12
AC 100~240V
50/60 Hz
5VA
3A
250Vac
ALM 2
ALM 1
COM
3A
250Vac
NO
OUT1
14V
or
4~20mA
or
0~10V
DC
+
-
COM
NO
COM
+
-
IN
OUT2/
ALM3
+
-
L
N
DTB4896
DTB9696
DTB4896/DTB9696
NO
COM
NC
5A
250Vac
1
4
3
2
5
7
6
9
8
10
11
14
15
13
12
16
19
20
18
17
AC 100~240V
50/60 Hz
5VA
OUTPUT1
14VDC
4~20mA
0~10V
NO
COM
NC
5A
250Vac
OUTPUT2/ALM3
14VDC
ALM2
COM
or
or
Tc
+
RTD
DATA+
DATA-
RS-485
SG
Ev1
Ev2
CT
ALM1
COM
IN
+
+
-
+
- -
-
L
N
DTB9696RRV
External Dimensions
Dimensions are in millimeter (inch)
DTB4824
DTB4848
48.0 mm
(1.89 in)
2
4
.0
m
m
(0
.9
4
in
)
3.4 mm
(0.13 in)
99.8 mm
(3.93 in)
2
1
.8
5
m
m
(0
.8
6
in
)
44.75 mm
(1.76 in)
2
2
.0
m
m
(0
.8
7
in
)
44.8 mm
(1.76 in)
48.0 mm
(1.89 in)
4
8
.0
m
m
(1
.8
9
in
)
9.5 mm
(0.37 in)
80.0 mm
(3.15 in)
4
4
.7
5
m
m
(1
.7
6
i
n
)
45.0 mm
(1.77 in)
+0.6
0
4
5
.0
m
m
(1
.7
7
i
n
)
+
0
.6
0
+0.02
0
+
0
.0
2
0
DTB4896
DTB9696
48.0 mm
(1.89 in)
12.8 mm
(0.50 in)
79.2 mm(3.12 in)
91.0
m
m
(3.58
in
)
95.
7
m
m
(3
.77
in
)
98.2
m
m
(3
.8
7 in
)
44.0 mm
(1.73 in)
44.5 mm
(1.75 in)
+0.6
0
91.5
m
m
(3
.6
0 in
)
+0
.6
0
+0.02
+0
.0
2
0
0
96.0 mm
(3.78 in)
96
.0
mm
(3
.7
8
in
)
98
.0
mm
(3.
8
6 in
)
15.8 mm
(0.62 in)
79.2 mm
(3.12 in)
90
.8
m
m
(3
.5
7
in
)
91.0 mm
(3.58 in)
+0.6
0
91
.0
mm
(3.
5
8 in)
+0
.6
0
+0.02
0
+0
.0
2
0
Mounting
Mounting Method
Mounting Bracket Installation
CT Wiring Method (if CT function is selected)
Step 1 : Insert the controller through the panel cutout.
Step 2 : Insert the mounting bracket into the mounting
groove at the top and bottom of the controller
Step 3 : Push the mounting bracket forward until the
bracket stops at panel wall.
Step 4 : Insert and tighten screws on bracket to secure the
controller in place. (The screw torque should be
0.8kgf-cm to 1.5kgf-cm)
DTB4824 Mounting Method:
DTB4848/4896/9696 Mounting Method:
1
3
2
06
.8
m
m
M
ax
.
Error Acknowledgement & Display
Communication error code response description:
Error Status 102EH / 4750H
PV read back 1000H / 4700H
Error status
0001H M/A
PV
unstable
0002H
8002H
Re-initial, no temperature at this time
0003H
8003H
Input sensor did not connect
0004H
8004H
Input signal error
0005H
N/A
Over input range
0006H 8006H
ADC
fail
0007H
N/A
EEPROM read/write error
Display message:
Power ON
Normal display
PV
DTB series, Firmware V1.50
Present value
SV
Output VR type with Event option
Set value
Sensor didn’t connect
Input error
PV
No
Error
SV
Connect
Input
EEPROM error
Input over range
PV
Error
PV flash when over
SV
EEPROM
How to Set Up Current Input
For normal input
For current input (4 ~ 20mA, 0 ~ 20mA)
The content of this instruction sheet may be revised without prior notice. Please consult our distributors or download the most updated version at
http://www.delta.com.tw/industrialautomation