Digilent 410-069P User Manual
Digilent Hardware
D
D
i
i
g
g
i
i
l
l
e
e
n
n
t
t
P
P
m
m
o
o
d
d
H
H
B
B
3
3
™
™
2
2
A
A
H
H
-
-
B
B
r
r
i
i
d
d
g
g
e
e
R
R
e
e
f
f
e
e
r
r
e
e
n
n
c
c
e
e
M
M
a
a
n
n
u
u
a
a
l
l
®
w w w . d ig i l en t inc . c om
Revision: February 28, 2012
Note: This document applies to REV D of the board.
215 E Main Suite D | Pullman, WA 99163
(509) 334 6306 Voice and Fax
Doc: 502-069
page 1 of 3
Copyright Digilent, Inc. All rights reserved. Other product and company names mentioned may be trademarks of their respective owners.
Overview
The Digilent PmodHB3
TM
2A H-Bridge Module
(the HB3) is an ideal solution for robotics and
other applications where logic signals are used
to drive small to medium-sized DC motors.
Features include:
•
a 2A H-bridge circuit for voltages up to
12V
•
two two-pin screw terminal blocks for
connection to motor
•
two buffered inputs for motor speed
feedback
•
small form factor (0.8” x 1.20”)
Functional Description
The HB3 works with power supply voltages
from 2.5V to 5V, but is normally operated at
3.3V as this is the supply voltage on most
Digilent system boards.
The HB3 is designed to work with either
Digilent programmable logic system boards or
embedded control system boards. Most
Digilent system boards, such as the Nexys,
Basys, or Cerebot, have 6-pin connectors that
allow the HB3 to plug directly into the system
board or to connect via a Digilent 6-pin cable.
Some older Digilent boards may need a
Digilent Module Interface Board (MIB) and a 6-
pin cable to connect to the HB3. The MIB plugs
into the system board and the cable connects
the MIB to the HB3.
Motor power is provided via a two-pin terminal
block (J3) that can accommodate up to 18-
gauge wire. The HB3 circuits can handle motor
voltages up to 12V.
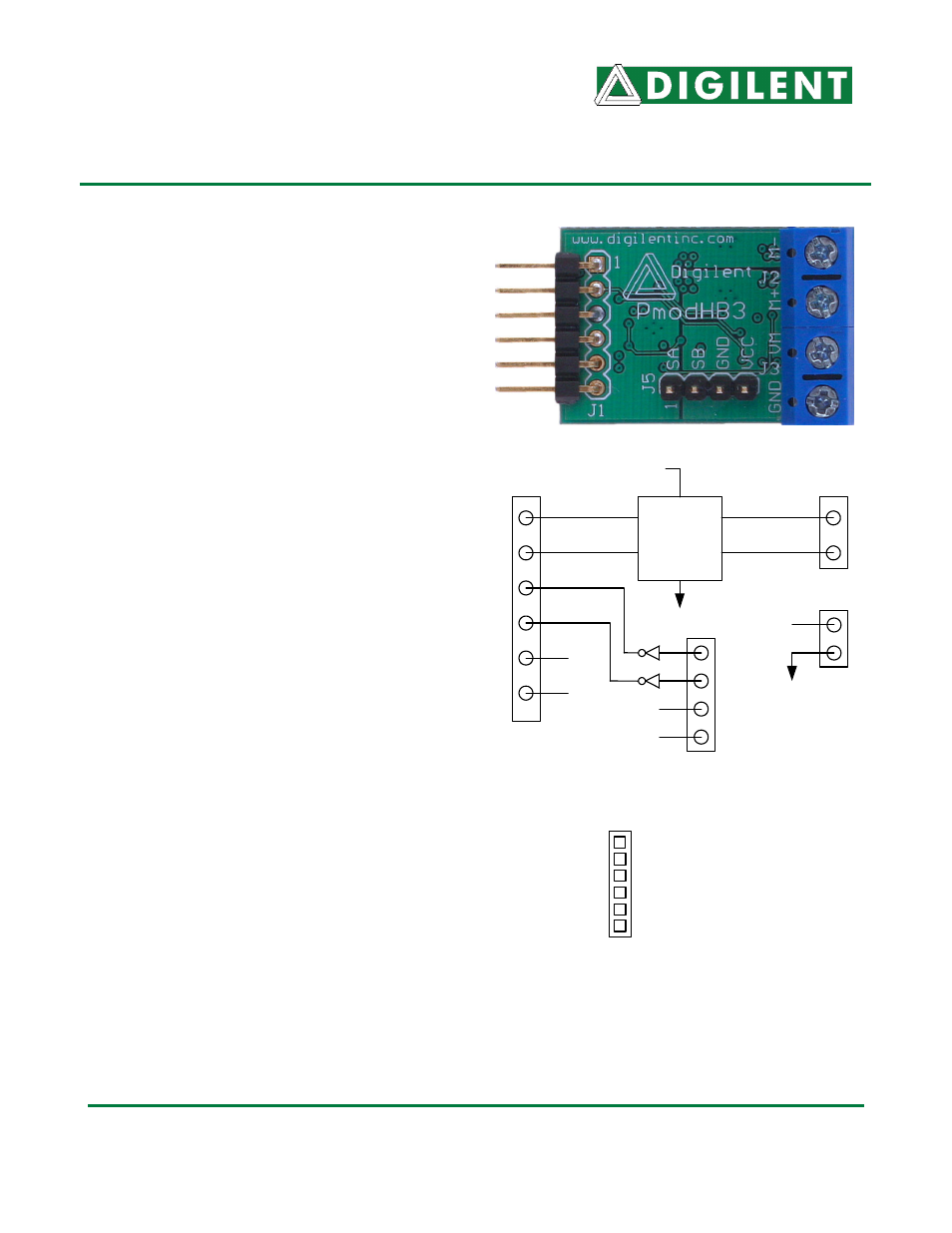
H-BRIDGE
CIRCUIT
VM
DIR
EN
SA
SB
GND
VCC
GND
VCC
GND
GND
VM
J1
J2
J3
M+
M-
J5
Vcc (3.3 - 5v)
GND
Direction
Enable
Sensor A
Sensor B
HB3 6-Pin Header, J1
The HB3 is controlled by a system board
connected to J1. The motor rotation direction is
determined by the logic level on the Direction
pin. Current will flow through the bridge when
the Enable pin is brought high. Motor speed is