Configuration, Setting the pan and tilt movement limits – Vinten Radamec Fusion FHR-120 User Manual
Page 28
Fusion FHR-120 robotic pan and tilt heads
26
Configuration
Setting the pan and tilt movement limits
When the head is first installed—and periodically thereafter—, it is necessary to set the limits of
movement for the pan and tilt axes to prevent collision with permanent obstacles and keep
unwanted areas of the studio out of shot. Before the limits can be set, the Vinten Radamec Fusion
configuration software tool must be installed, either onto a laptop for localised use within the
studio or onto a PC or server, typically also running the Vinten Radamec Controller software.
To set the pan and tilt movement limits, proceed as follows:
1.
Switch OFF power to the head [13].
2.
Disconnect the cable from the Ethernet port [6].
3.
Connect the laptop or PC running the configuration software tool to the USB port [9]
on the head using a USB system configuration cable.
4.
Align the pan and tilt axes to zero position (the camera cradle [1] should be aligned
horizontally and vertically, respectively, to the head).
5.
Switch ON power to the head.
6.
On the laptop or PC, double-click the Fusion Setup and Test icon to launch the
configuration software tool. The Vinten Fusion Robot Control window opens (Fig. 12).
WARNING!
Turn OFF power before connecting or disconnecting cables on the head.
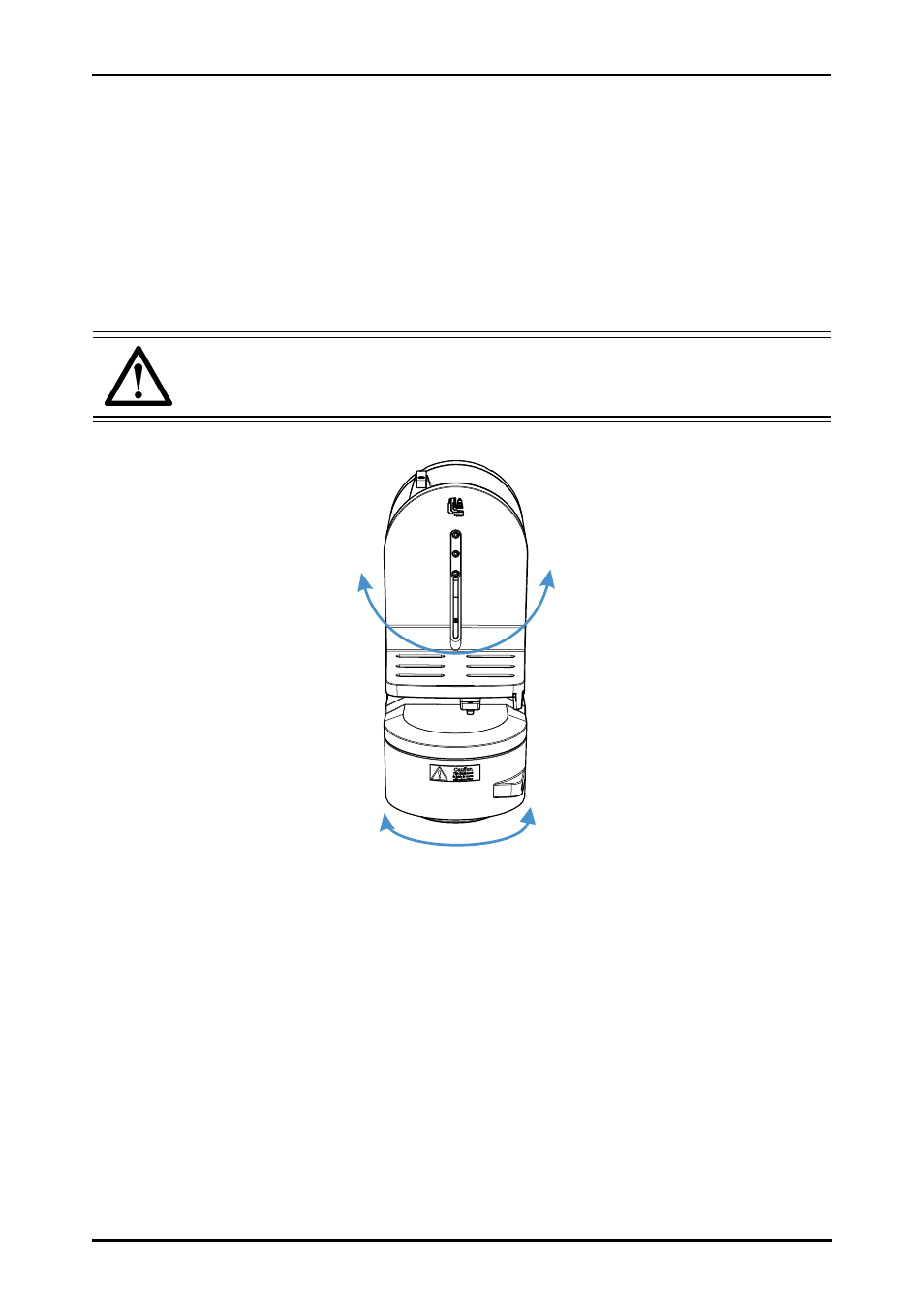
Fig. 11 Angles of travel on the pan and tilt axes
Negative angle of
travel on the tilt
axis.
Positive angle of
travel on the tilt
axis.
Negative angle of
travel on the pan
axis.
Positive angle of
travel on the pan
axis.