Rockwell Automation 57C428 Toledo Scale Interface Module User Manual
Page 19
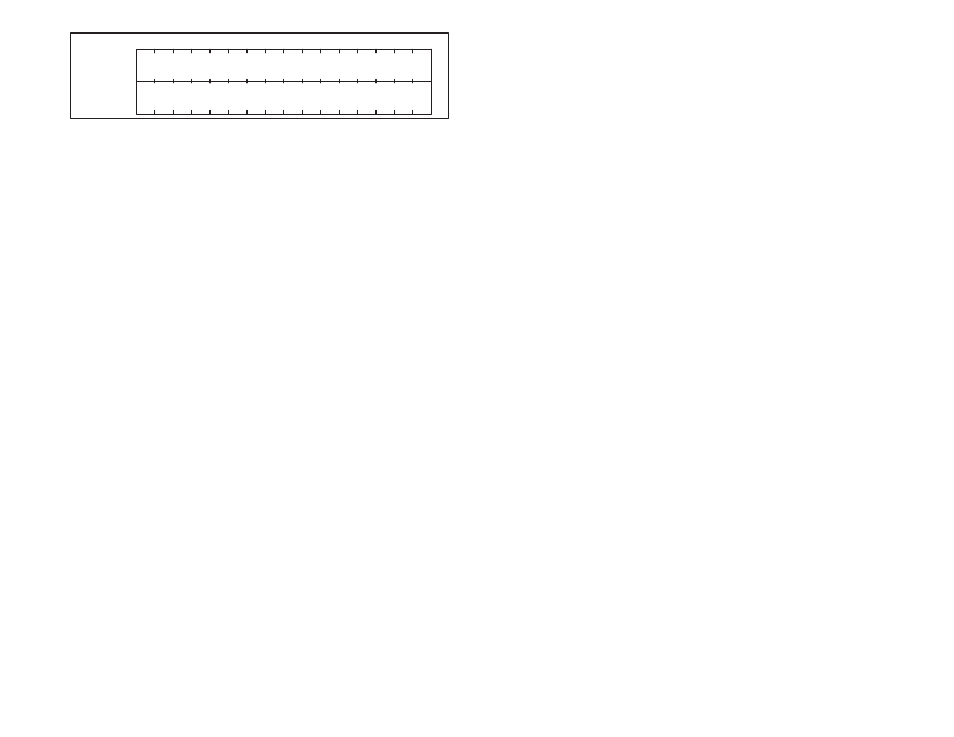
4Ć3
bits
register 21
22
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
baud rate (1200Ć9600)
link timeĆout (1Ć10 seconds)
Figure 4.5Ć Control Registers
register 23
Ć
Setpoint Update Request
register 24, 25
Ć
Setpoint #1
register 26, 27
Ć
Setpoint #2
register 28, 29
Ć
Setpoint #3
register 30, 31
Ć
Setpoint #4
register 32, 33
Ć
Setpoint #5
register 34, 35
Ć
Setpoint #6
register 36, 37
Ć
Setpoint #7
register 38, 39
Ć
Setpoint #8
Registers 24 through 39 may contain eight doubleĆinteger Setpoint
values. The Setpoint values must be specified with the same implied
decimal point as the Indicated Weight from the Indicator. The values
are first stored in registers 24 to 39. Then register 23 must be set to a
nonĆzero value to initiate the update in the Interface. The Interface
software will set register 23 to a zero value after the update is
complete. Setpoint values may be changed at any time, but you must
to set register 23 to initiate the update. The Setpoints are initialized to
zero on powerĆup.
4.1.2
Toledo Scale Data Registers
The Toledo Scale status and weight data registers contain the data
transmitted from the Toledo Scale digital indicator. All registers are
readĆonly with the exception of register 64.
Register 64 is used to initiate an update of registers 65Ć77. In order to
read the scale data (status and weight), first set the request/status
register to a value of one. Next, monitor the register for a value less
than or equal to zero. A value of zero indicates valid data which may
be read by the BASIC task. A negative value in the request/status
register indicates an error condition. Refer to figure 4.6 for an
explanation of error codes for register 64.
Data is received continuously by the module. The data is placed in
dual port memory only when requested via the request/status
register (register 64). The data that will be stored in dual port memory
will be the last valid message that was received by the module.
Registers 66Ć77 are not updated if an error status is returned.