Default input and output (i/o) assembly formats, Setting the motor fla and overload trip class – Rockwell Automation 280D ArmorStart - Getting Started User Manual
Page 16
16
Publication 280D-QS001D-EN-P - July 2006
required, the information below can be used to map a device based on the
default configuration.
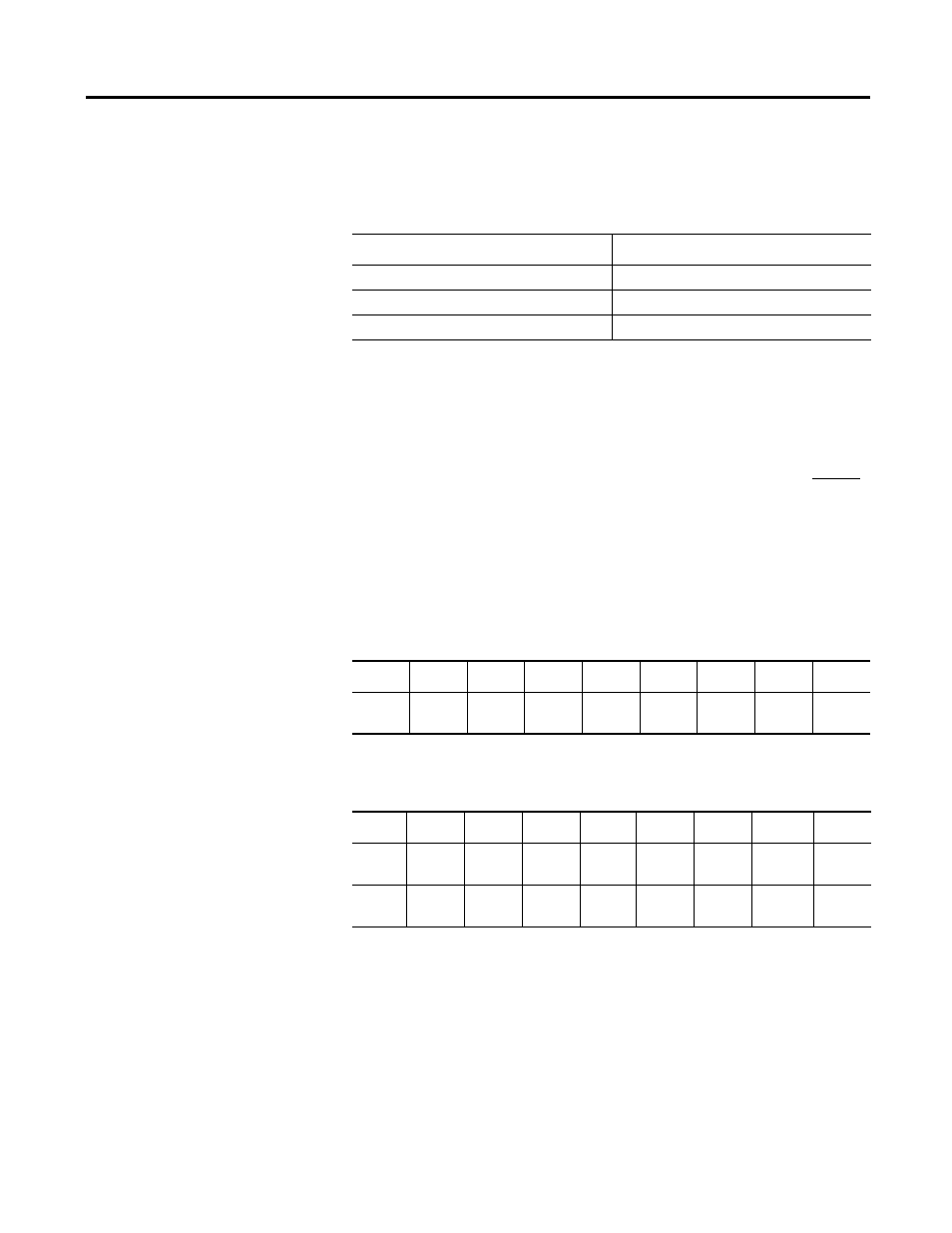
Table 3
Default I/O Messaging Data
Default Input and Output (I/O) Assembly Formats
The I/O assembly formats for the ArmorStart
are identified by the value in
parameter 11 (Consumed IO Assy.) and parameter 12 (Produced IO Assy.).
These values determine the amount and arrangement of the information
communicated to the master scanner. The tables below identify the default
information produced and consumed by DOL (Bulletin 280) and Reversing
(Bulletin 281) devices. For additional formats and advance configurations
please reference the user manual:
Defaults for Standard Distributed Motor Controllers
Table 4
Instance 160 - Default Consumed data for Standard Distributed Motor
Controller Output information arrangement (1 byte)
Table 5
Instance 161 - Default Produced data for Standard Distributed Motor
Controller Input information arrangement (2 bytes)
Setting the Motor FLA and Overload Trip Class
The product should now be configured and communicating on the network.
The last step is to program the proper motor FLA setting (parameter #106)
and overload trip class (parameter #107). This can be accomplished by
using software such as RSNetWorx for DeviceNet or a handheld DeviceNet
tool.
Default
Message type
Polled
Consumed data size
1 byte (Rx)
Produced data size
2 bytes (Tx)
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
User Out
B
User Out
A
Not
Used
Not
Used
Not
Used
Fault
Reset
Run Rev
Run Fwd
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
Not
Used
Not
Used
Not
Used
Ready
Running
Rev
Running
Fwd
Warning
Tripped
1
Not
Used
Not
Used
140M
On
HOA
Status
User In 3 User In 2
User In 1
User In 0