Default input and output (i/o) assembly formats – Rockwell Automation 284D ArmorStart - Getting Started User Manual
Page 23
Publication 284D-QS001D-EN-P - July 2006
23
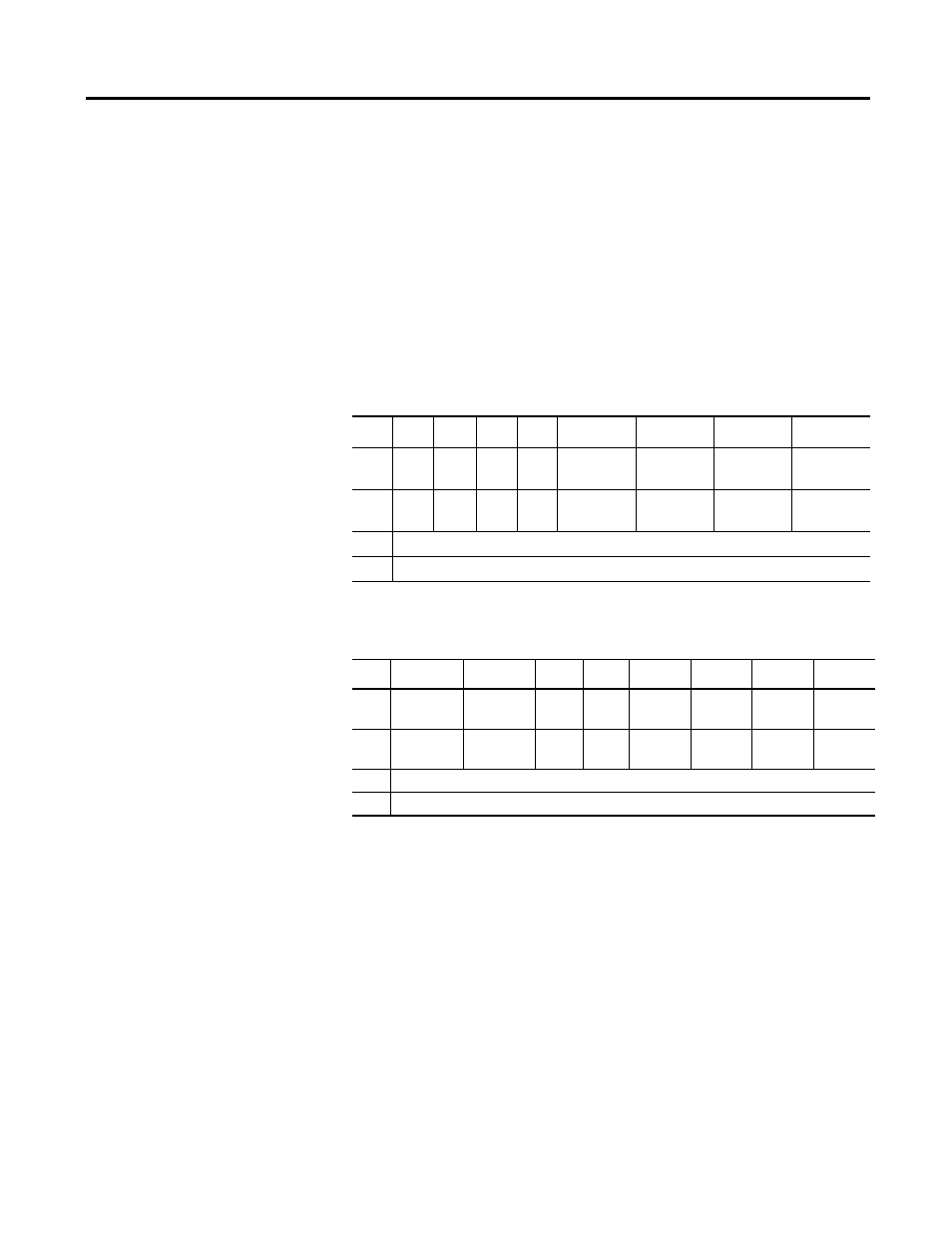
Default Input and Output (I/O) Assembly Formats
The I/O assembly formats for the ArmorStart
are identified by the value in
Parameter 11 (Consumed IO Assy.) and Parameter 12 (Produced IO Assy.).
These values determine the amount and arrangement of the information
communicated to the master scanner. The tables below identify the default
information produced and consumed by Bulletin 284 devices. For additional
formats and advance configurations please reference the user manual:
Defaults for Bulletin 284 Distributed Motor Controllers
Table 4
Instance 164 — Default Consumed Inverter Type Distributed Starter
(4 bytes)
Table 5
Instance 165 — Default Produced Inverter Type Distributed Starter
(4 bytes)
➊ Refers to output contactor status.
➋ Refers to source brake contactor status.
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
User
Out B
User
Out A
—
Jog
Rev
Jog Fwd
Fault Reset
Run Rev
Run Fwd
1
Drive
In 4
Drive
In 3
Drive
In 2
Drive
In 1
Decel Rate 2
Enable
Decel Rate 1
Enable
Accel Rate 2
Enable
Accel Rate 1
Enable
2
Comm Frequency Command (Low) (xxx.x Hz)
3
Comm Frequency Command (High) (xxx.x Hz)
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
At
Reference
Net Ref
Status
Net Ctl
Status
Ready
Running
Rev
Running
Fwd
Alarm
Tripped
1
Contactor 2
➊
Contactor 1
➋
140M
On
HOA
Status
Input 3
Input 2
Input 1
Input 0
2
Output Frequency (Low) (xxx.x Hz)
3
Output Frequency (High) (xxx.x Hz)