Flying missions – 3D Robotics IRIS Plus User Manual
Page 22
20
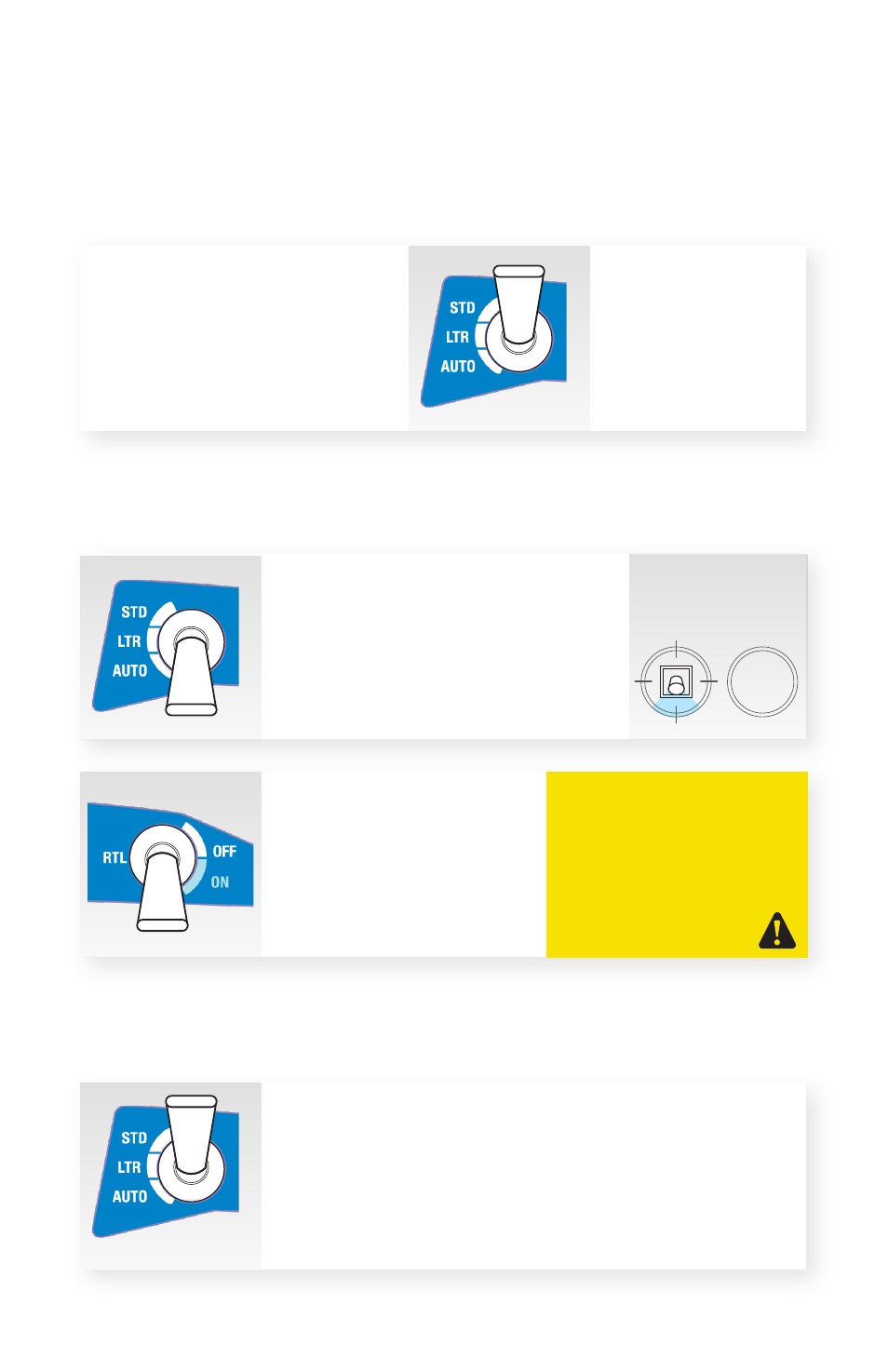
To avoid sudden changes
in altitude when switching
from auto to standard (STD),
ensure that the left stick is
set to the center position.
Fly a brief test flight to verify
that all controls (throttle, yaw,
roll, and pitch) are responding
normally.
1
Perform a pre-mission
test flight.
If you planned a takeoff waypoint into
your mission, switch to AUTO on the
ground, and raise the throttle to initiate
the mission. If you did not add a takeoff
waypoint, switch to AUTO mode after
takeoff to initiate the mission in flight.
3
Switch to
AUTO.
When the mission is complete and IRIS has landed,
use the controller to switch to standard (STD) then
disarm and proceed with the postflight steps.
If you added an automatic landing waypoint to your
mission, IRIS will disarm automatically after landing.
4
Switch to standard
before disarming.
To recall IRIS during a mission,
use the controller to switch
to standard (STD) and land
manually. Or switch to RTL,
and automatically return to
the launch point.
2
Arm IRIS
in standard.
When you’re ready
to start the mission,
arm IRIS in standard
(STD).
Flying Missions
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
Left Stick
For auto-takeoff,
raise throttle to
start mission.