4 configuration, 4 configuration, Stat – Lenze S94CAN01A User Manual
Page 6: Cand, Can0, Cans
4
ENGLISH
4
ENGLISH
Technical Data
3.4 Configuration
Drive 94 supports CANopen communication protocol through its CANopen Communication
Module. Upon power up, the drives firmware detects the CAN Module and automatically
enables both the CANopen functionality as well as the CANopen configuration menu.
We can utilize SimpleServo LED display and push buttons to both configure the drive for the
CAN network, as well as check and set drive parameters. The “UP” (
▲) and “DOWN” (▼)
buttons are used to navigate through the drives parameters.
Power up the drive and review the display.
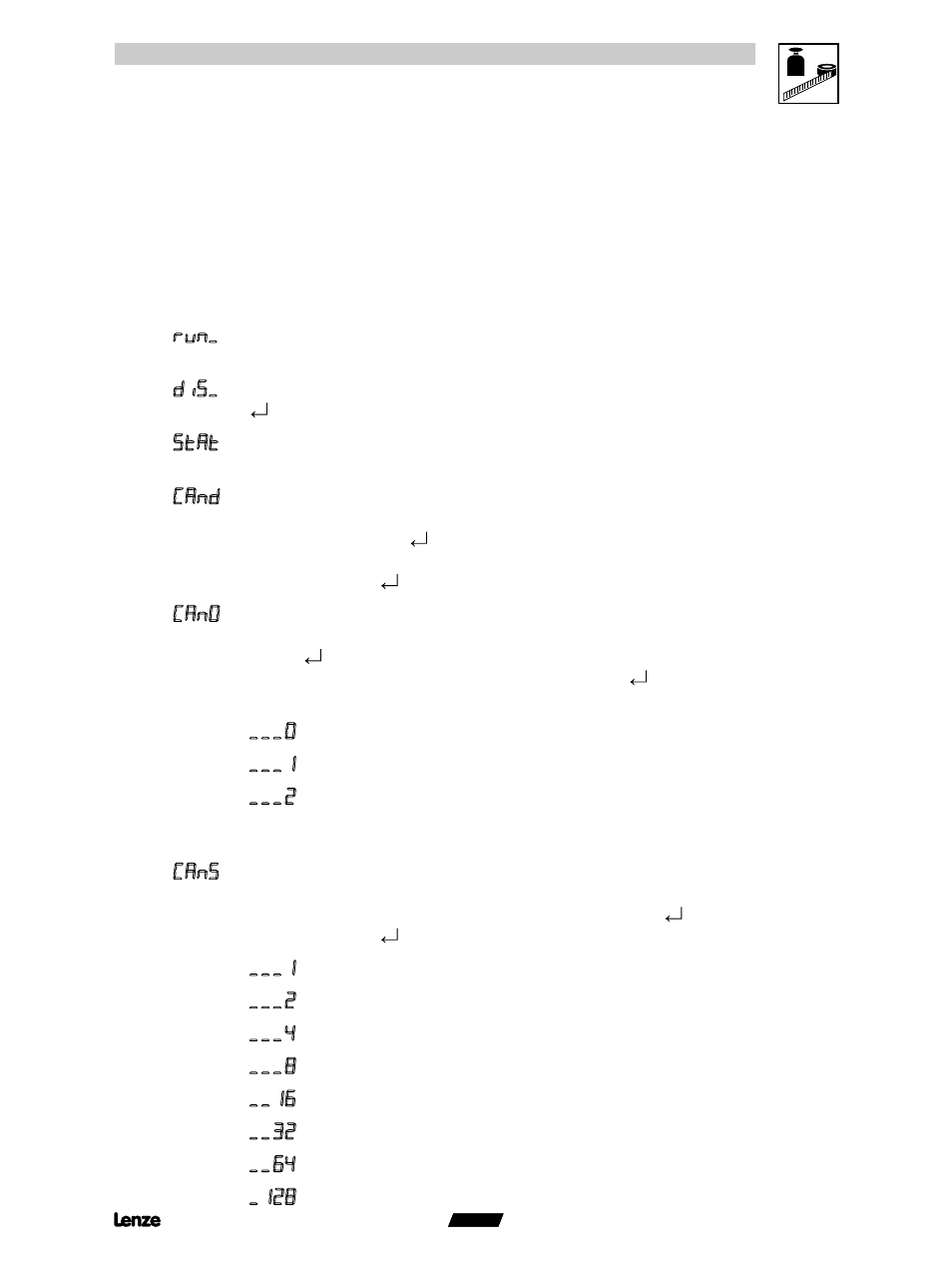
rvn_
Drive is Enabled and in Run mode. Disable the drive by deactivating the Enable
input.
DiS_
Drive is Disabled and ready to be configured. Press the “ENTER” button
( ) to continue.
StAt
Current drive status. From here you use the “UP” (
▲) and “DOWN” (▼) buttons to
navigate through the drives parameters. Press the “DOWN” (
▼) button to continue.
CAnd
CAN delay menu. This is the delay in seconds after which a “start remote node”
message can be broadcast and its value is between 0 and 5 (seconds). Press
the “ENTER” button ( ) to view this number and use the “UP” (
▲) and “DOWN”
(
▼) buttons to change the delay setting. Set the delay back to “0” and press the
“ENTER” button ( ) to exit. Press the “DOWN” (
▼) button to continue.
CAn0
CAN operational mode. This is where you define what mode you want the drive to
be in at power up. This parameter is R/W. To view the setting, press the “ENTER”
button ( ). Use the “UP” (
▲) and “DOWN” (▼) buttons to change the setting.
Select setting “1” and press the “ENTER” button ( ) to store your setting and to
exit. Press the “DOWN” (
▼) button to continue
___0
CAN starts in pre-operational state.
___1
CAN starts in operational mode.
___2
CAN starts in operational mode and is a “quasi master”, meaning that it
will send “start remote node” message (described in standard DS301)
after a delay specified in CAnd menu.
CAnS
CAN network status value. This is a binary representation of the status of the
CAN network. This is read only parameter and you can have more than one
status active at one time. Press the “ENTER” button ( ) to view status. Press the
“ENTER” button ( ) to exit. Press the “DOWN” (
▼) button to continue.
___1
Initialization Complete.
___2
CAN bit or frame error occurred.
___4
CAN “error passive” occurred.
___8
Receive queue overrun occurred.
__16
Transmit queue overrun occurred.
__32
Reserved
__64
Reserved
_128
CAN “bus off” error occurred