3 communication objects, Communication objects – Lenze S94CAN01A User Manual
Page 10
8
ENGLISH
Communication Objects
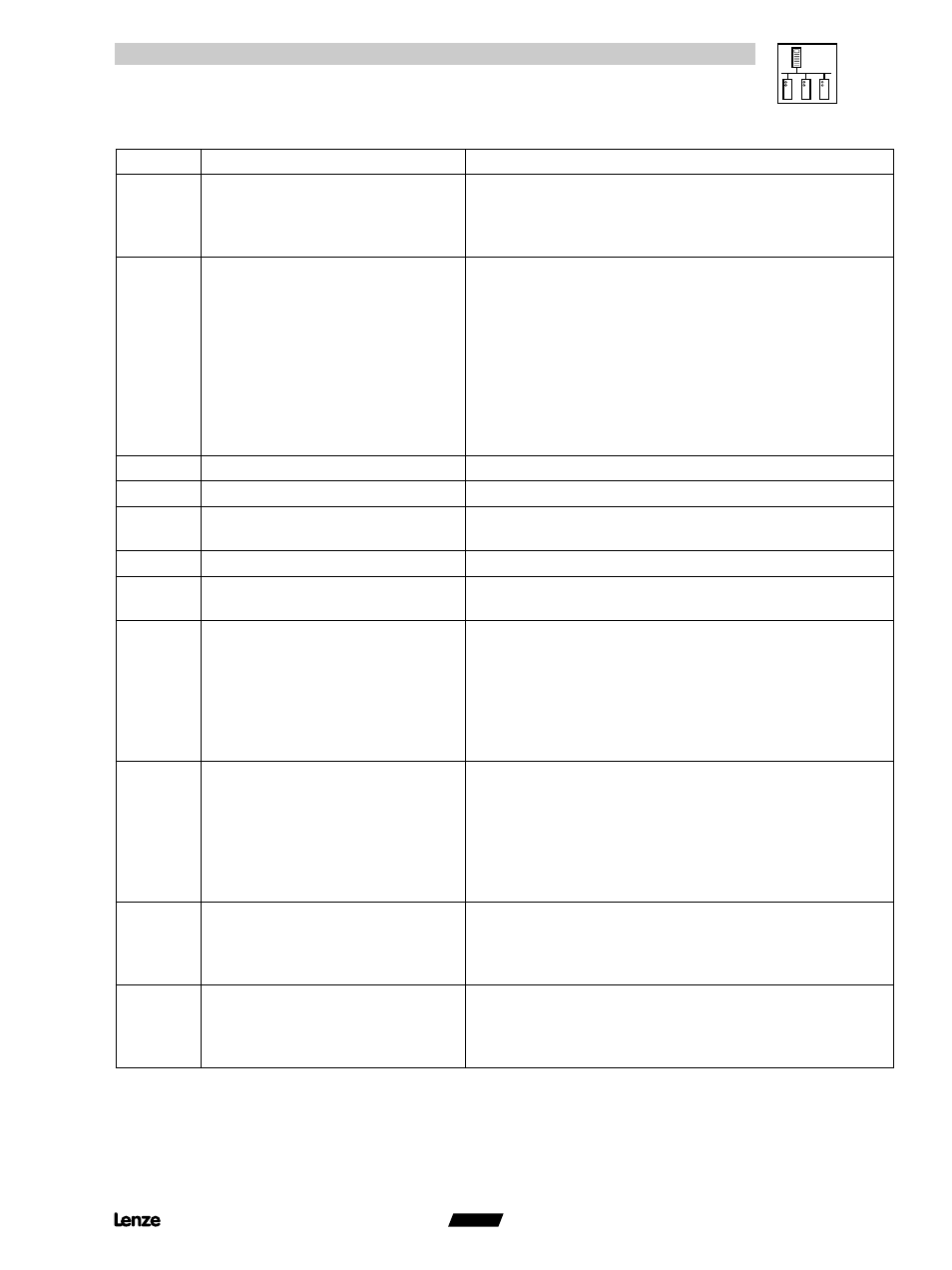
4.3 Communication Objects
OBJECT NAME
DESCRIPTION
1000h
Device Type
The E94 Drive is not DSP 402 compliant but follows some
of the major velocity and torque profiles recommendations.
Therefore it uses custom device profile value of
0x00022192.
1001h
Error Register
The following values are allowed:
0 – NO error
1 – over voltage
2 – feedback error
3 – over current
4 – over temperature
5 – external fault detection
6 – over speed
7 – position error excess
8 – bad motor data
1008h
Manufacturer Device Name
Drive 94 uses the ‘SS94’ device name
1009h
Manufacturer Hardware Version
It is 0x94xx where xx is the current version number
100Ah
Manufacturer Software Version
It is 0x94xx where xx is the current version number
1017h
Producer Heartbeat Time
See 1.2 above
1018h
Identity Object
Vendor ID – 0x00456765
Product Code - 0x0000005E
1400h
1
st
receive PDO Parameter
(Torque)
Asynchronous PDO with 255 transmission type used only
if the drive is in CAN Torque mode. The target torque
update is triggered immediately upon receiving of this
RPDO.
Sub index 01 contains the RPDO COB-ID and has R/W
access. The default value of this COB-ID is 0x200 + CAN
network node id/address.
1401h
2
nd
receive PDO Parameter
(Velocity)
Asynchronous PDO with 255 transmission type and used
only if the drive is in CAN Velocity mode. The target
velocity update is triggered immediately upon receiving of
this RPDO.
Sub index 01 contains the RPDO COB-ID and has R/W
access. The default value of this COB-ID is 0x300 + CAN
network node id/address.
1600h
1
st
receive PDO Mapping (Torque)
Only the following static mapping is supported:
Sub index 01 -> 6040h Control word
Sub index 02 -> 6071h Target Torque
NOTE: This object is used only in CAN Torque mode
1601h
2
nd
receive PDO Mapping (Velocity) Only the following static mapping is supported:
Sub index 01 -> 6040h Control word
Sub index 02 -> 60FFh Target Velocity
NOTE: This object is used only in CAN Velocity mode