Bryant 548J User Manual
Page 5
5
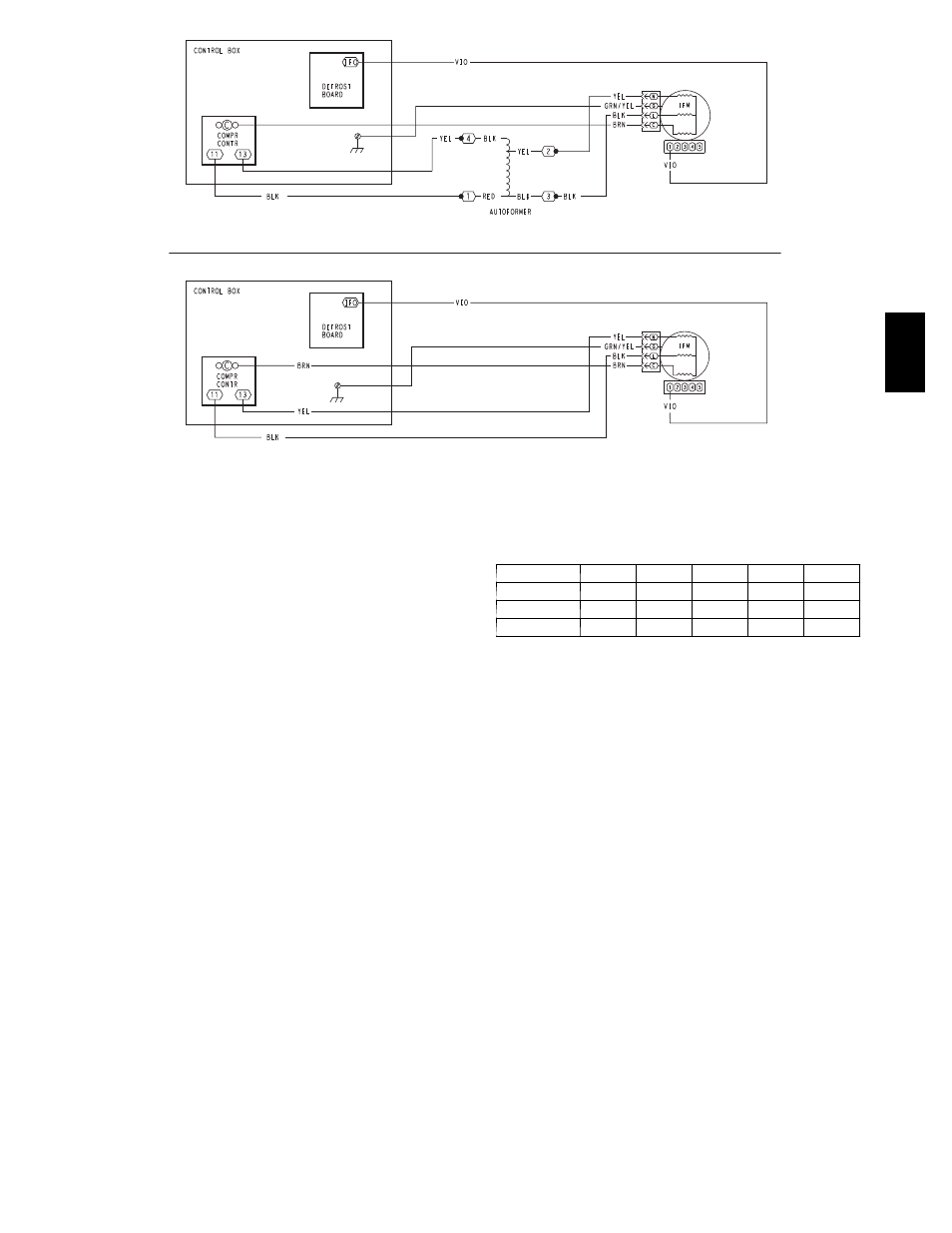
460, 575-v Units
208/230-v Units
C09263
Fig. 7 -- EMC Unit Wiring
ECM Motor – The direct--drive motor is an X13
Electronically Commutated motor (ECM). An ECM
contains electronic circuitry to convert single--phase line
AC voltage into a 3--phase DC voltage to power the motor
circuit. The motor circuit is a DC brushless design with a
permanent magnet rotor. On the X13 design, the
electronic circuitry is integral to the motor assembly and
cannot be serviced or replaced separately.
208/230--v units use a 230--v motor. 460--v units use a
230--v motor with a stepdown transformer (mounted on
the end of the fan housing, see Fig. 5). 575--v units use a
460--v motor with an autotransformer. Motor power
voltage is connected to motor terminals L and N (see
Fig. 6 and Fig. 7); ground is connected at terminal G.
The motor power voltage is ALWAYS present; it is not
switched off by a motor contactor.
Motor operation is initiated by the presence of a 24--v
control signal to one of the five motor communications
terminals. When the 24--v signal is removed, the motor
will stop. The motor control signal is switched by the
defrost board’s IFO output.
Evaluating motor speed – The X13 ECM is a constant
torque motor design. The motor speed is adjusted by the
motor control circuitry to maintain the programmed shaft
torque. Consequently there is no specific speed value
assigned to each control tap setting. At the Position 5 tap,
the motor speed is approximately 1050 RPM (17.5 r/s) but
it will vary depending on fan wheel loading.
Selecting speed tap – The five communications terminals
are each programmed to provide a different motor torque
output. See Table 1. Factory default tap selection is
Position 1 for lowest torque/speed operation.
Table 1 – 548J Standard Static Motor Tap Programing
(percent of full--load torque)
Unit Size
Tap 1
Tap 2
Tap 3
Tap 4
Tap 5
04
32
38
45
50
100
05
46
58
61
69
100
06
73
82
85
90
100
Factory Default: Tap 1 (VIO)
To select another speed:
1. Disconnect main power to the unit.
2. Remove the motor signal lead (VIO) at the motor
communications terminal.
3. Reconnect the motor signal lead to the desired speed
terminal.
4. Connect main power to the unit.
Motor “rocking” on start--up – When the motor first starts,
the rotor (and attached wheel) will “rock” back and forth
as the motor tests for rotational direction. Once the correct
rotation direction is determined by the motor circuitry, the
motor will ramp up to specified speed. The “rocking” is a
normal operating characteristic of ECM motors.
Troubleshooting the ECM motor – Troubleshooting the
X13 ECM requires a voltmeter.
1. Disconnect main power to the unit.
2. Remove the motor power plug (including the control
BRN lead) and VIO control signal lead at the motor
terminals.
3. Restore main unit power.
4. Check for proper line voltage at motor power leads
BLK (from L terminal) and YEL (from N terminal).
548J