RMS Technologies R256 CONTROLLER/DRIVER User Manual
Page 15
Setting the Current
CAUTION! DO NOT SET THE CURRENT 1.4 TIMES ABOVE THE MOTOR’S
RATED CURRENT.
In order to set the correct current for your motor, you must program the specified
amount in HyperTerminal
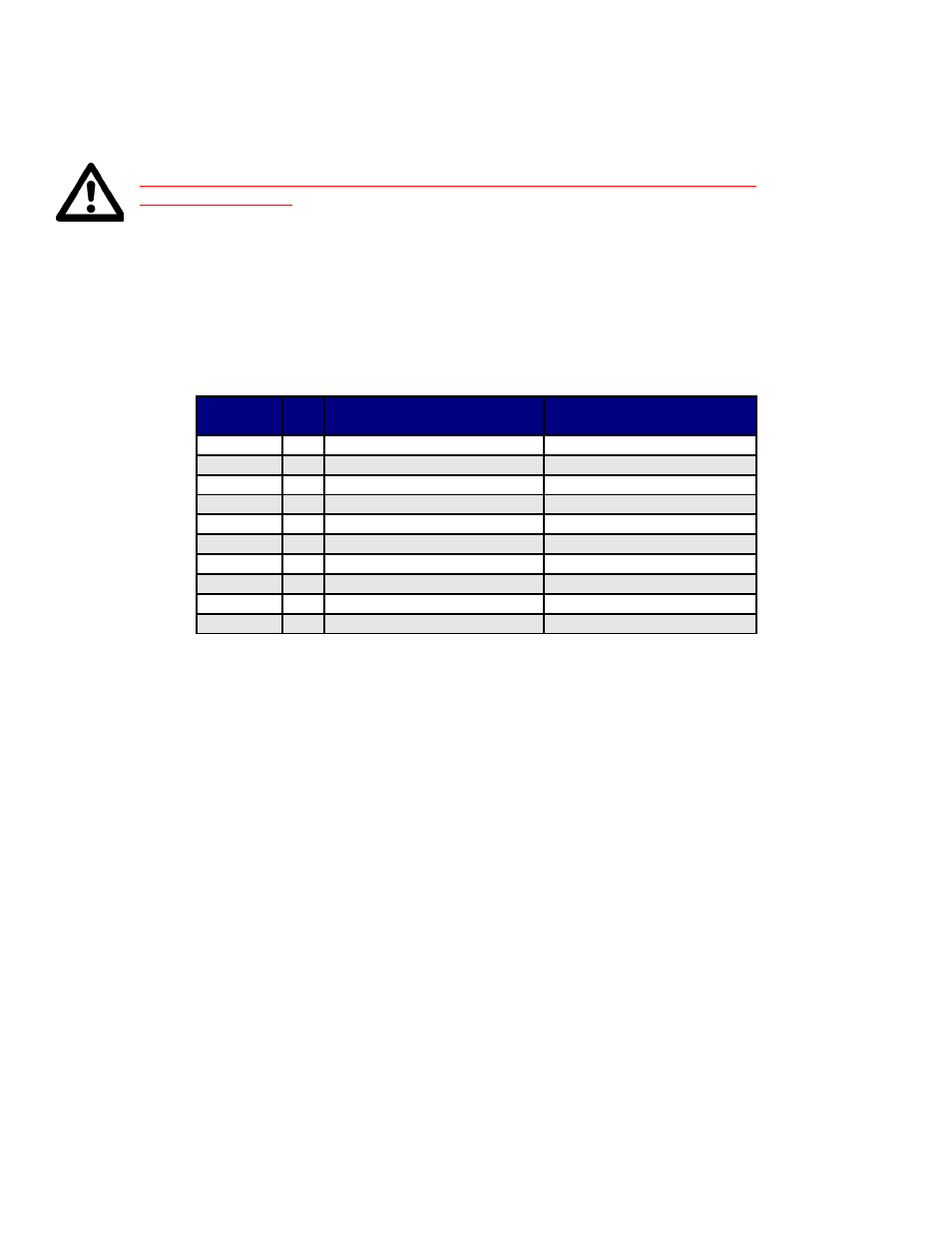
Current is set based on the Maximum amount of current the controller board can
output, which is 2.0 Amps Peak. Since all drivers only speak in terms of Amps Peak
current, we must translate from the motor’s rated current (Amps/Phase or Amps
RMS) to peak current. Below is a table of how much current will be applied to your
motor for each setting.
Percent
Motor’s Current Rating
(Amps/Phase)
Driver’s Equivalent
Current (Amps Peak)
10%
=
0.14
0.20
20%
=
0.28
0.40
30%
=
0.42
0.60
40%
=
0.57
0.80
50%
=
0.70
1.00
60%
=
0.85
1.20
70%
=
0.99
1.40
80%
=
1.13
1.60
90%
=
1.27
1.80
100%
=
1.41
2.00
Table 6: Desired Current
To achieve the equivalent Driver Current (Amps Peak), multiply your
motor’s rated current by 1.4. Follow these examples:
Motor’s Rated Current x 1.4 = Driver Peak Current
Example One:
You have a motor that is rated at 0.85 Amps, 0.85 Amps x 1.4 = ~1.2 Amps Peak.
Using Table 3 we would see that 1.2 Amps is 60% of the driver’s maximum output
current.
Assuming the R256 Controller is addressed to Number 1, this is what you’d program:
/
1m60R
Example Two:
You have a motor that is rated at 1.0 Amps, and your Controller is addressed to
Number 1, this is what you’d program:
/1m70R
This will set the controller to 1.4 Amps Peak. How did we get 1.4 Amps? 1.0
Amps x 1.4 = 1.4 A
RMS Technologies
Page 15
Version 1.05
R256 Controller Manual
4/3/2009