AMX NetLinx NXM Series User Manual
Page 42
NXC-VAI4 Analog Voltage Control Card
36
NetLinx Cardframe, Control Cards, and NetModules
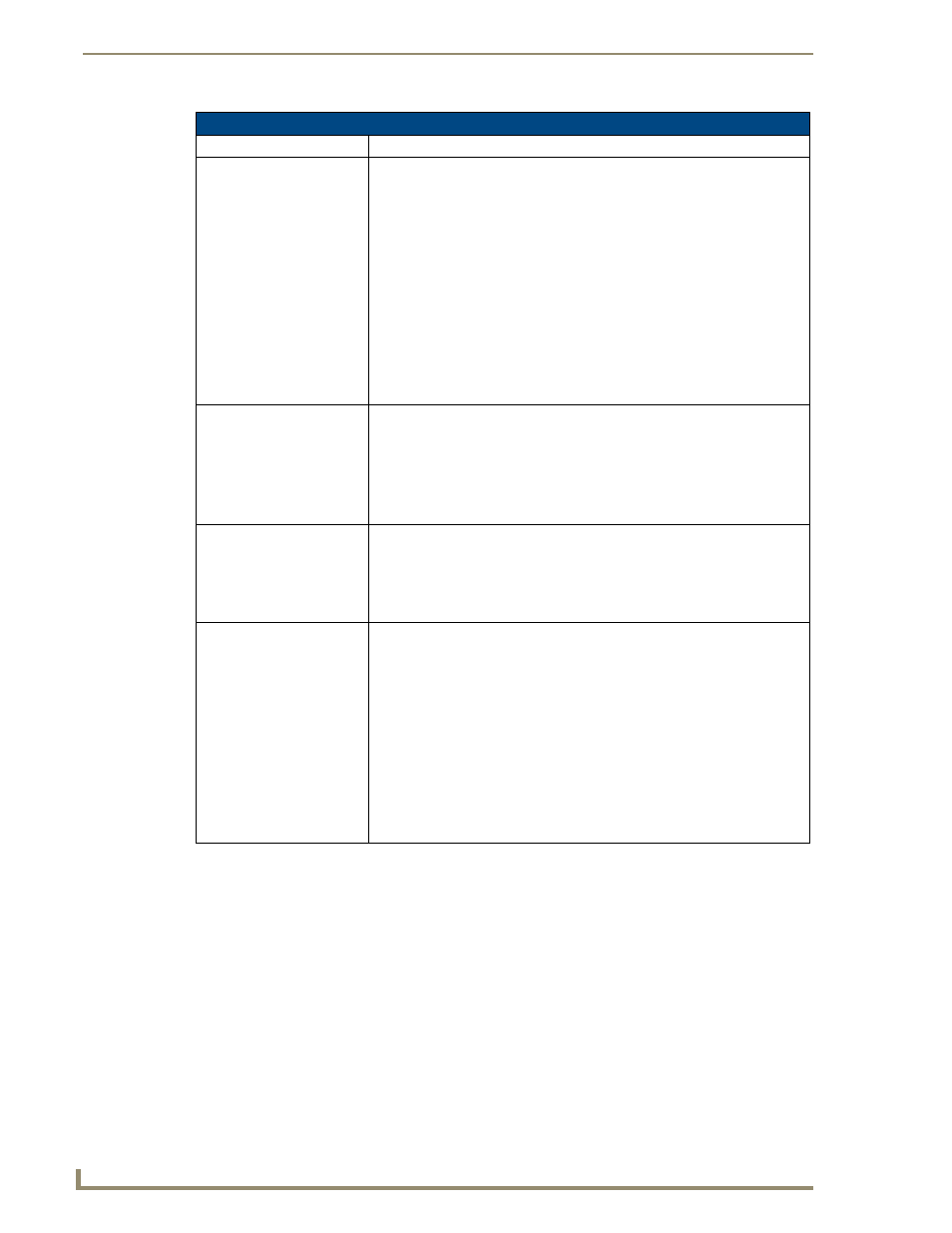
NXC-VAI4 Send_Commands (Cont.)
Command
Description
GS
Sets the speed variable to be
used for future positional (GL)
commands.
The change of speed takes place immediately even if a positional change
operation is currently in progress. The voltage output for speed 0 (i.e. when no
motion is desired) is at the mid-point between the Min and Max output
voltages. The positive speed 127 is the max and negative speed 127 is the
min. Other speeds are scaled proportionately.
Syntax:
SEND_COMMAND
Variable:
I/O: Any Output ('1', '2, '3', 4')
SPEED: A fixed output value in the range of 0 (slowest)-127 (fastest - default)
Example:
SEND_COMMAND
Sets Output 1 servo speed to 64 (50%).
LEVOFF
The NXC-VAI4 will not
transmit any level value
messages after the receipt of
this command until the
receipt of the LEVON
command.
Syntax:
SEND_COMMAND
LEVON
The NXC-VAI4 will not
transmit any level value
messages until after the
receipt of this command.
This command is sent automatically when the CREATE_LEVEL command is
executed.
Syntax:
SEND_COMMAND
PC
Sets the shape of the Output
Syntax:
SEND_COMMAND
Variables:
OUTPUT: Any Output ('1', '2', '3', or '4')
CURVE:
'N' - Normal linear
'L' - Logarithmic
'I' - Inverted logarithmic
Example:
SEND_COMMAND
Sets "CURRENT OUTPUT 1 RAMP CURVE" to logarithmic.