4 compare results – Triton Navigation User Manual
Page 21
Page 18
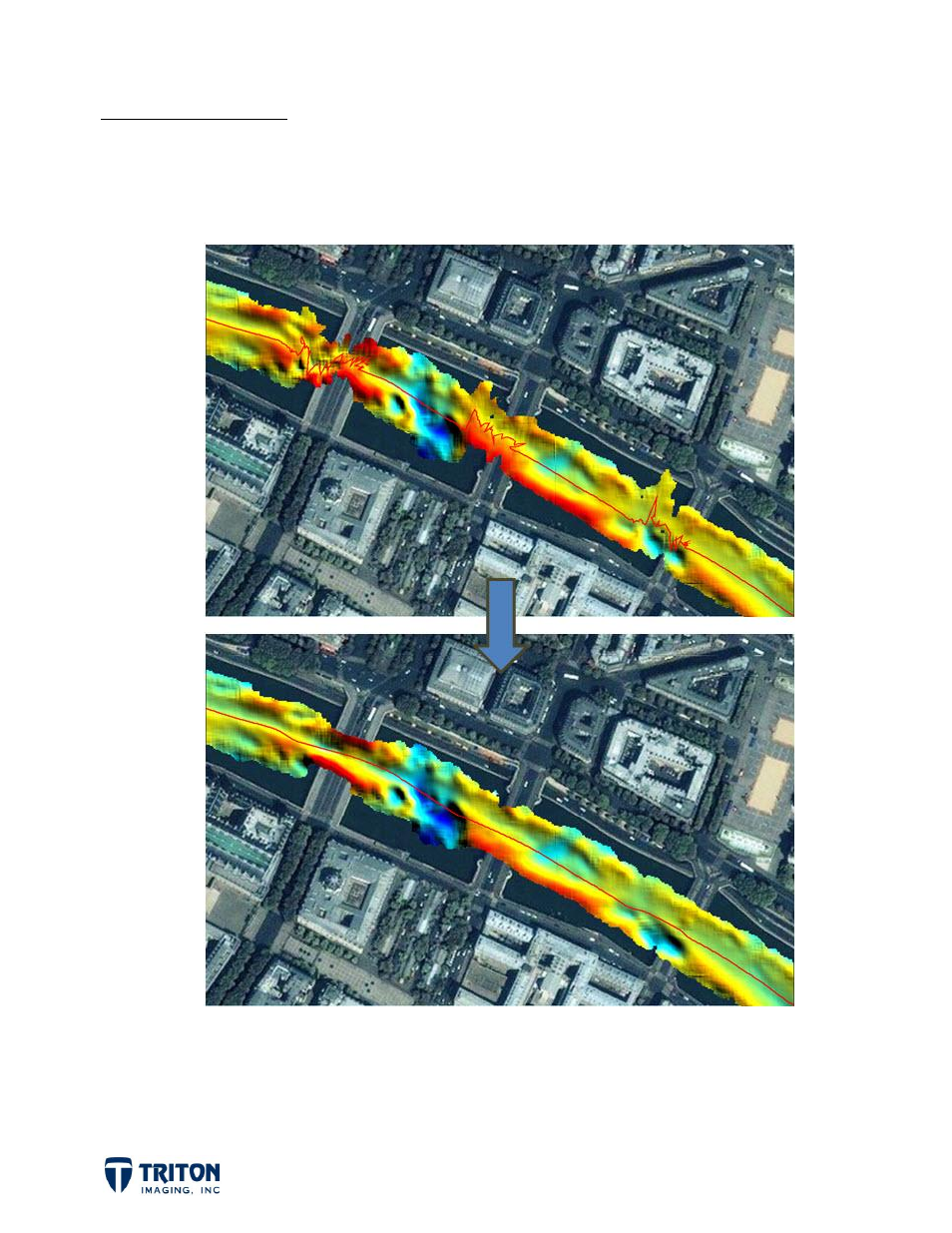
5.4 Compare Results
This data example started with very erratic navigation beneath the bridges spanning the
river. With repeat navigation processing it was possible to smooth the bad navigation to
approximate the true vessel position as it passed under the bridges.
It is important to note that even with navigation as bad as this file started with, one pass
through the navigation filter was basically enough to get good bathymetry processing
results, especially if the boxcar filter window size is increased to a larger number than the
default value of 12.