2 layout, 1 sensor coil orientation, Layout – PNI RM3100 Sensor Suite User Manual
Page 18: Sensor coil orientation, Figure 4-3: lr oscillator circuit biasing diagram
PNI Sensor Corporation
Doc 1017252 r03
RM3100 & RM2100 Sensor Suite User Manual
Page 17 of 45
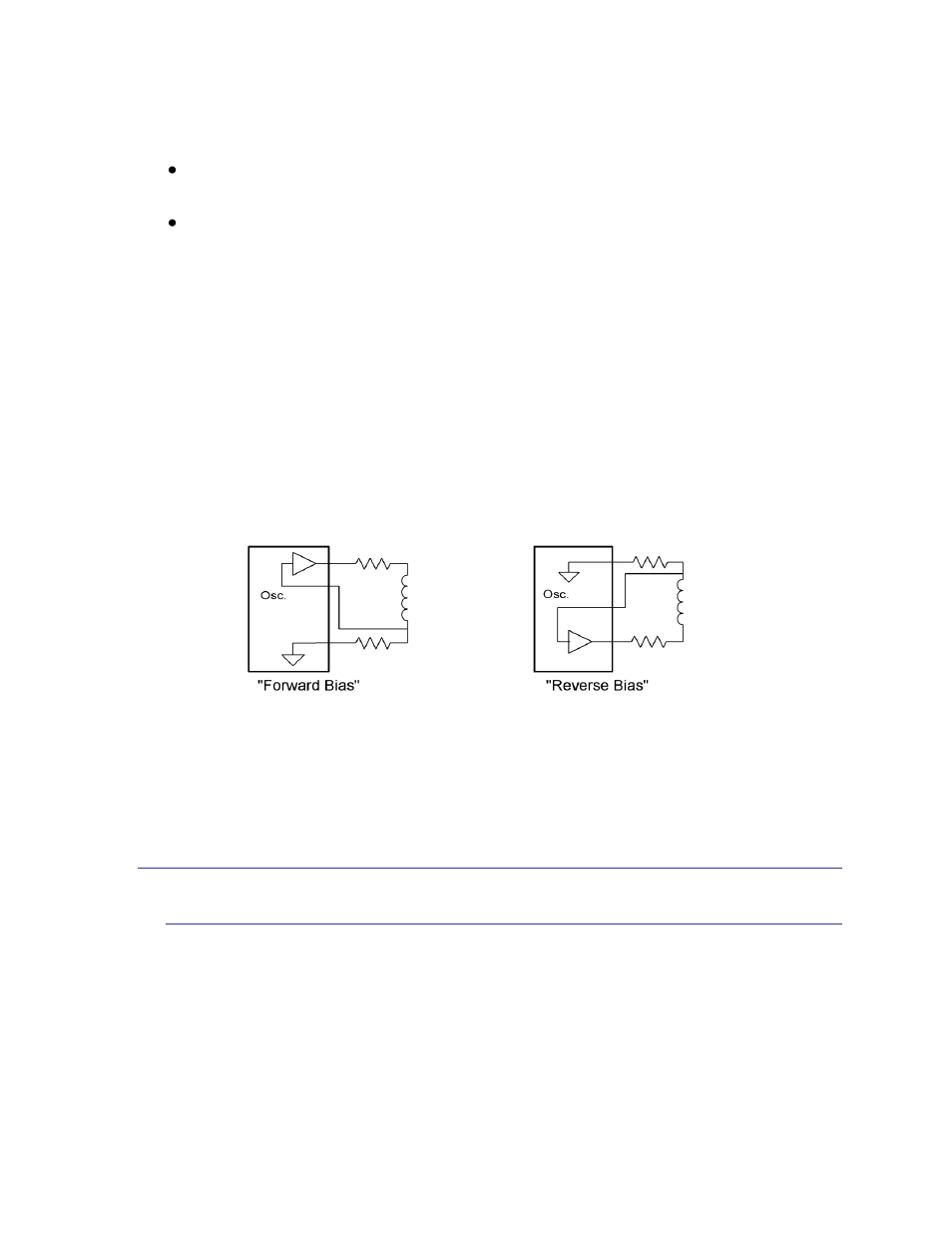
Because:
the total magnetic field represents the sum of the local field and the circuit-induced
field, and
the circuit-induced magnetic field has the same magnitude but opposite direction for
the two bias polarities,
the local magnetic field is proportional to the difference in the time to complete the
measurement for each bias. The difference in the number of clock oscillations between the
forward and reverse bias directions is output from the MagI2C, and this number is directly
proportional to the strength of the local magnetic field in the direction of the sensor.
Figure 4-3 provides a detail of the biasing circuit. For more on PNI’s magneto-inductive
technology, refer to the “Magneto-Inductive Technology Overview” white paper found on
PNI’s website.
Figure 4-3: LR Oscillator Circuit Biasing Diagram
Since PNI’s Geomagnetic Sensor Suite works in the frequency domain, resolution is cleanly
established by the number of circuit oscillations. Also, the output from the MagI2C is
inherently digital and can be fed directly into a microprocessor, which eliminates the need for
signal conditioning or an analog/digital interface between the sensor and host processor.
4.2 Layout
4.2.1 Sensor Coil Orientation
Figure 4-4 indicates how the three sensor coils in a RM3100 Geomagnetic Sensor should
be oriented for a system referenced as north-east-down (NED). The arrow represents the
direction of travel or pointing. The Sen-XY-f is insensitive to the location of the polarity
indicator, while the location of the polarity indicator is critical for the Sen-Z-f.