Unwind with dancer and emag brake, Unwind with load cells and emag brake, Initial set of parameters – Cleveland Motion Controls Quantum Tension Controller REV A User Manual
Page 6: Process, Closed loop, Wiring
www.cmccontrols.com
6
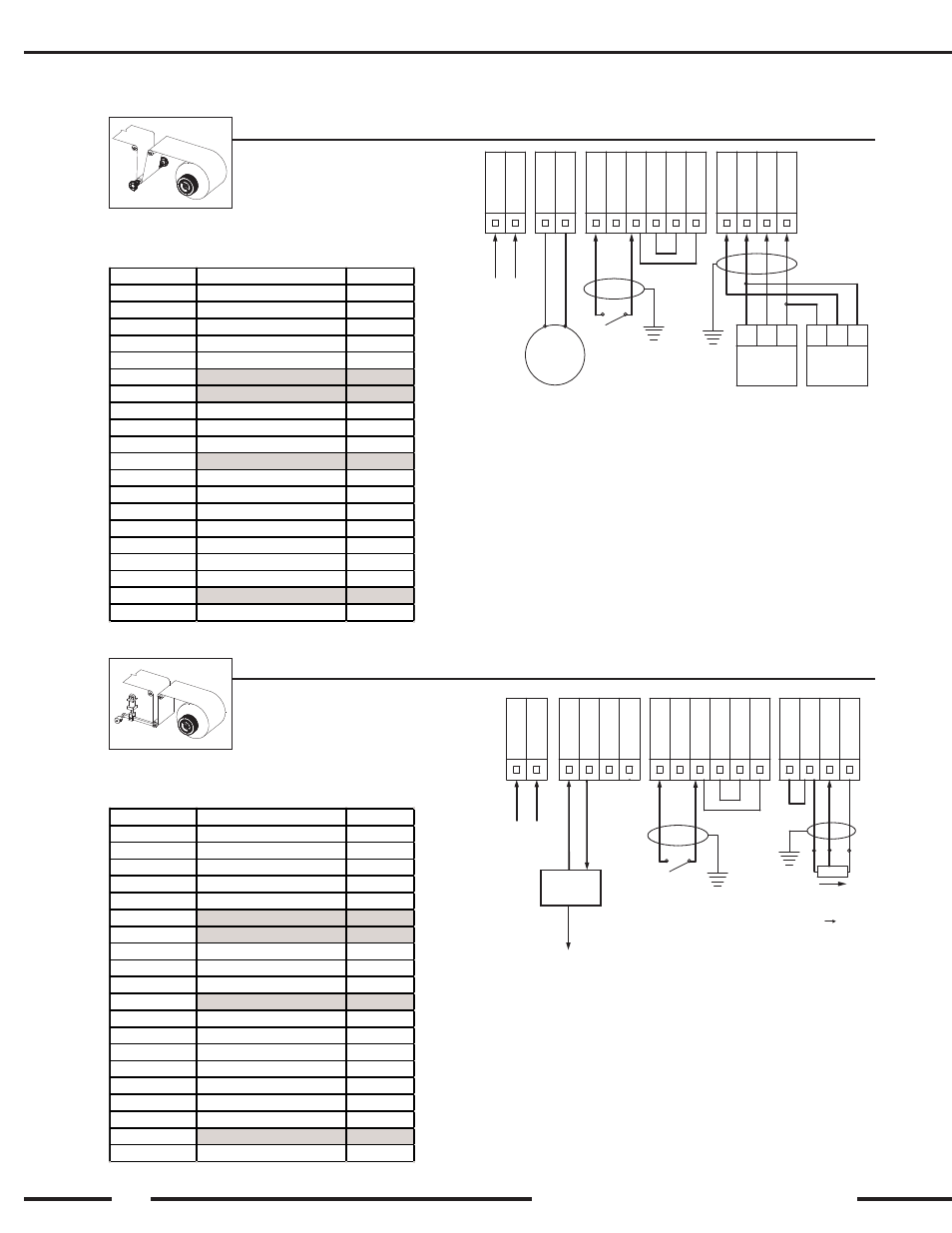
Initial set of parameters
File : Dancer.prm
Machine / product stopped : B = 0V (OPEN)
Web Tension = HOLD value (Open Loop)
Machine / product running : B = 24V (CLOSED)
Web Tension = SET POINT value (Closed Loop)
Process
Machine / product stopped : B = 0V (OPEN)
Web Tension = HOLD value (Open Loop)
Machine / product running : B = 24V (CLOSED)
Web Tension = SET POINT value (Closed Loop)
Process
Com
+24
C1
C2
V+
A
B
V+
Init
Reg
S1-
Com
S1+
+5V
+24 V
AC / DC
EMAG
Brake
Jumpers
BK
R
WH
BK
R
WH
Load cell
Classic
Load cell
Classic
Logic
input B
N.O.
Com
+24
Com
AO2
V+
A
B
V+
Init
Reg
S1-
Com
S1+
+5V
+24 V
AC / DC
Jumpers
Logic
input B
N.O.
Position
Potentiometer
4.5 10 k
Ω
Com
AO1
E/P
Transducer
Air Brake
Wiring
Note : all Com / 0V are linked to the ground
Note : all Com / 0V are linked to the ground
Initial set of parameters
File : Force_feedback.prm
Wiring
DISPLAY
Line 1
Set Point
Line 2
Measure
FUNCTIONS
Time Delay Start
1
Time Delay Stop
300
Hold
10
INPUTS
Set Point
50
Diameter Filtering
Tachymeter Filtering
OUTPUTS
Upper Limit
0
Bottom Limit
10
Power Gain
100
REGULATION Max Effort
P
100 (*)
I
20 (*)
D
0
Measurement Filtering 100 (*)
Open Loop Gain
0
Closed Loop Gain
100
Speed Gain
0
Coeff Speed
Overspeed
0
DISPLAY
Line 1
Set Point
Line 2
Measure
FUNCTIONS
Time Delay Start
1
Time Delay Stop
300
Hold
100
INPUTS
Set Point
50
Diameter Filtering
Tachymeter Filtering
OUTPUTS
Upper Limit
0
Bottom Limit
10
Power Gain
100
REGULATION Max Effort
P
100 (*)
I
5 (*)
D
100 (*)
Measurement Filtering 5
Open Loop Gain
0
Closed Loop Gain
100
Speed Gain
0
Coeff Speed
Overspeed
0
UNWIND WITH DANCER AND EMAG BRAKE
CLOSED LOOP
UNWIND WITH LOAD CELLS AND EMAG BRAKE
CLOSED LOOP
*
Other load
c
e
l
l
s
configuratios,
see page 9