5typical application examples, Open loop, Initial set of parameters – Cleveland Motion Controls Quantum Tension Controller REV A User Manual
Page 5
5
TYPICAL APPLICATION EXAMPLES
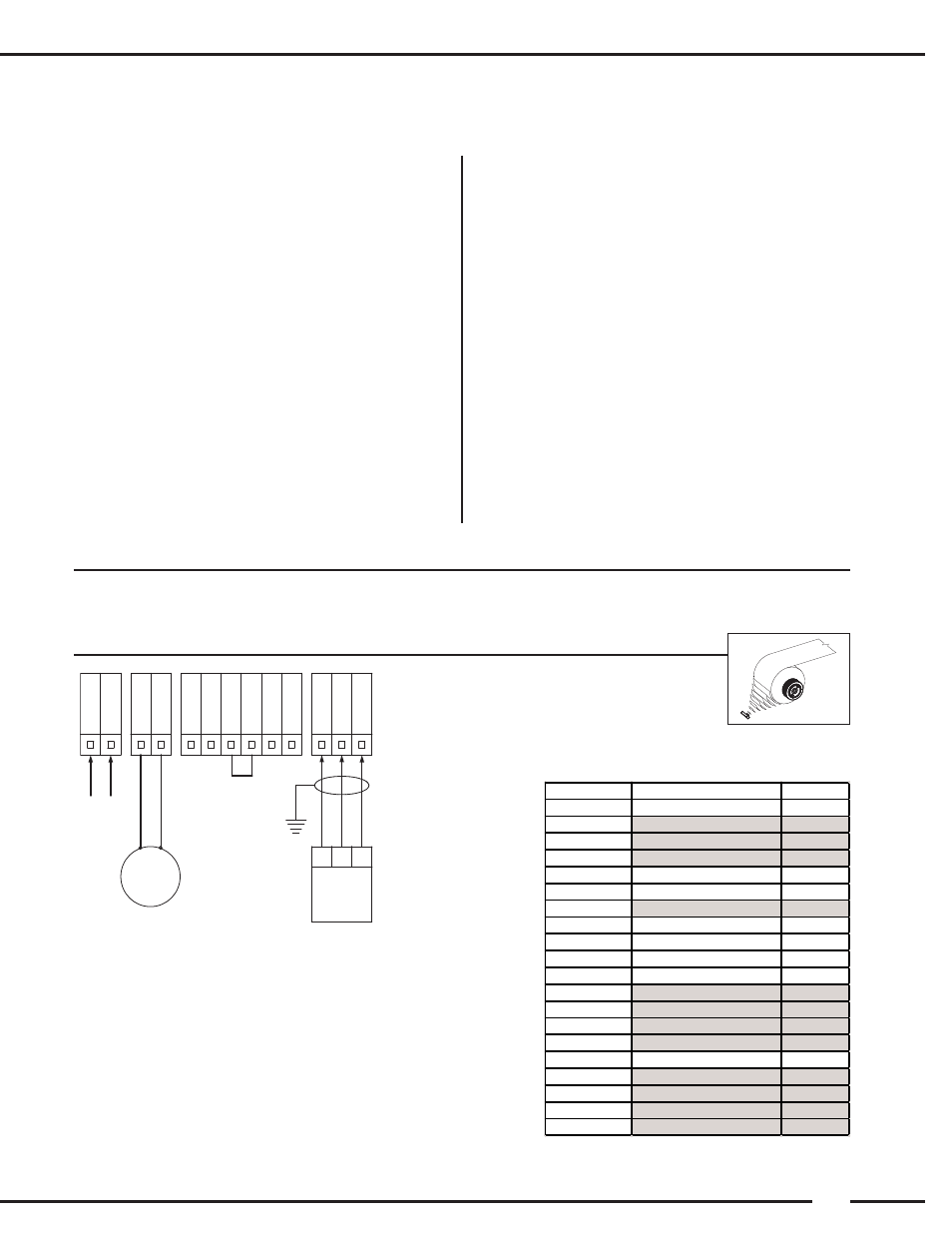
WIRING UNWIND WITH EMAG BRAKE AND ULTRASONIC SENSOR
OPEN LOOP
Com
+24
C1
C2
V+
A
B
V+
Init
Reg
Com
DM
+24
+24 V
AC / DC
EMAG
Brake
Ultrasonic
Sensor
+
-
S
Blue
Bleu
Y
ellow
Jaune
Brown
Brun
Jumper
NR7
Initial set of parameters
File : Diameter_measurement.prm
DISPLAY
Line 1
Set Point
Line 2
Diameter
FUNCTIONS
Time Delay Start
Time Delay Stop
Hold
INPUTS
Set Point
50
Diameter Filtering
1000
Tachymeter Filtering
OUTPUTS
Upper Limit
0
Bottom Limit
10
Power Gain
100
REGULATION Max Effort
100
P
I
D
Measurement Filtering
Open Loop Gain
100
Closed Loop Gain
Speed Gain
Coeff Speed
Overspeed
Note : all Com / 0V are linked to the ground
Troubleshooting
Check:
All wiring, in particular ensure cable
shields are properly connected
Ensure the parameter settings are in
full accordance with the related
applications tables
Stability:
When necessary adjust the parameters
(*) to improve the system stability
Note:
Variable PID (coefficients are
proportional to the diameter) is also
available when system stability cannot
be obtained (diameter measurement
must be available).
Detailed features about the Variable
PID are fully available in the Help file
included to the PC software
CAUTION:
Ensure the required “Process” (link
to the machine automation) is
active before starting the system
(logic input B)