Operation – Bell & Gossett HS 618B Series GT610-IP Electronic-Pneumatic Transducer User Manual
Page 2
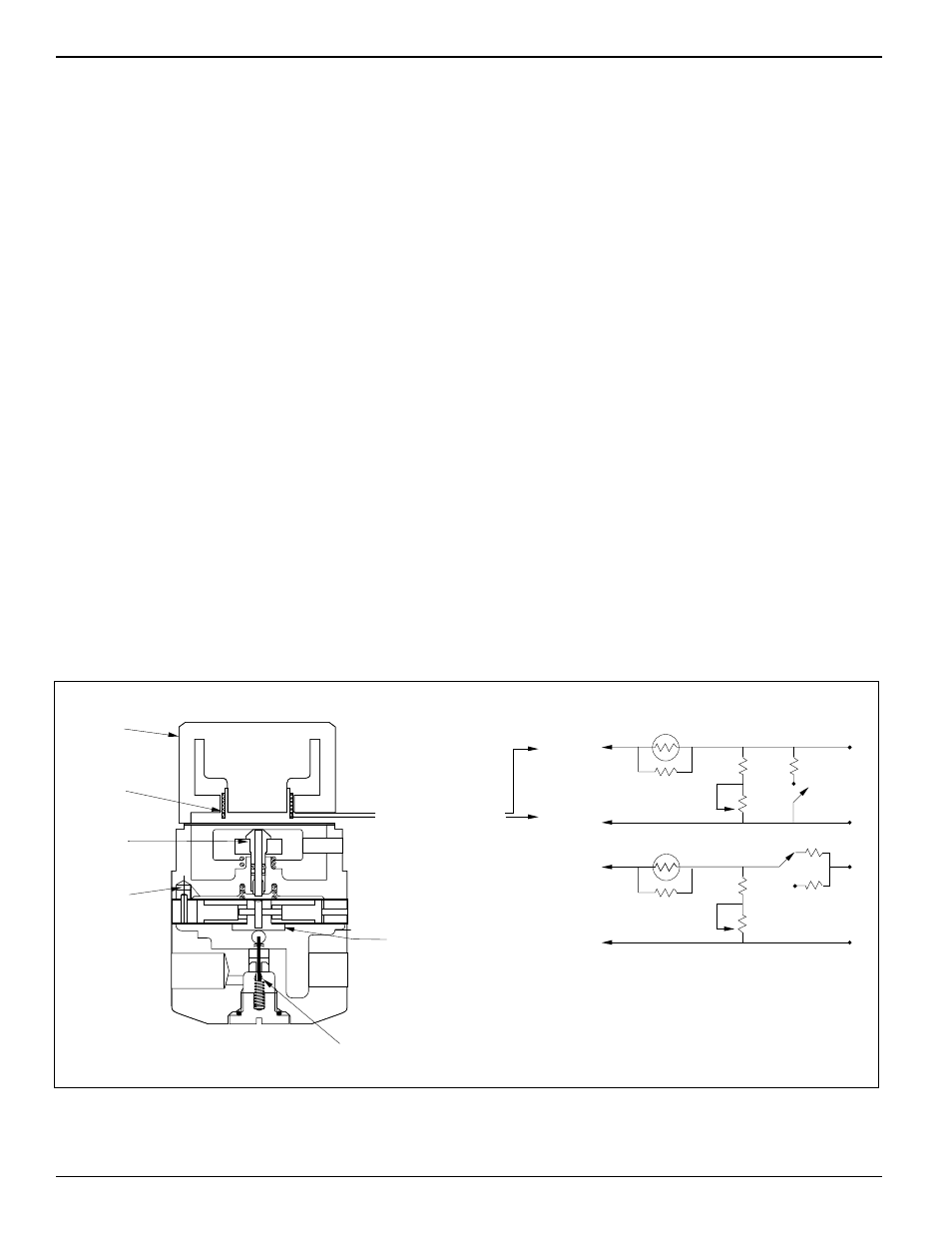
In the direct acting mode, an increase in the input signal
causes the coil to move away from the magnet which moves
the flexure assembly toward the nozzle. This reduces the
flow through the nozzle increasing the back pressure in the
top chamber of the booster. The increased pressure in the
booster causes the diaphragm assembly to move down-
ward, opening the pilot valve and increasing the output
pressure. The output pressure will continue to increase
until it is equal to the nozzle back pressure and the forces
on the diaphragm assembly are balanced.
A decrease in the input signal allows the coil to move
toward the magnet which moves the flexure assembly
away from the nozzle. This allows the flow through the
nozzle to increase which reduces the back pressure in the
top of the booster. Since the output pressure is greater than
the nozzle back pressure, there is a net upward force on the
diaphragm assembly which causes it to move upward
allowing the pilot valve to close and opening the relief port.
The excess output pressure is vented to atmosphere
through the relief port until equilibrium is established.
In the reverse acting mode, an increase in the input sig-
nal causes the coil to move toward the magnet instead of
away from it since the direction of the current through the
coil is reversed. An increasing signal, therefore, causes a
proportionally decreasing output.
OPERATION
Inputs:
4-20 or 10-50 mA DC
0-5 or 1-9 VDC
Outputs:
GT610 = 6-30 Psig (41-207 kPa)
MAGNET
NOZZLE
COIL
FIXED
ORIFICE
ELECTRICAL INPUT
EXTERNAL
ZERO ADJUST
OUTPUT AIR SIGNAL
PILOT VALVE
EXHAUST (TYPICALLY
ATMOSPHERIC AIR)
DIAPHRAM
ASSEMBLY
FILTERED
AIR SUPPLY
(20 PSI
REQUIRED
+
-
+
-
T1
R5
COIL
COIL
TL
R5
R4
10-50
R2
mA
mA
4--20
0-5V
1-9V
H2
R1
H2
R3
R4
R3