Rainbow Electronics MAX6660 User Manual
Page 8
MAX6660
Remote-Junction Temperature-Controlled
Fan-Speed Regulator with SMBus Interface
8
_______________________________________________________________________________________
improvement in leakage and noise over narrow
traces. Use wider traces when practical.
7)
Add a 50
Ω resistor in series with V
CC
for best
noise filtering (see Typical Operating Circuit).
PC Board Layout Checklist
• Place the MAX6660 close to the remote-sense junc-
tion.
• Keep traces away from high voltages (+12V bus).
• Keep traces away from fast data buses and CRTs.
• Use recommended trace widths and spacings.
• Place a ground plane under the traces.
• Use guard traces flanking DXP and DXN and connect-
ing to GND.
• Place the noise filter and the 0.1µF V
CC
bypass
capacitors close to the MAX6660.
Twisted-Pair and Shielded Cables
Use a twisted-pair cable to connect the remote sensor
for remote-sensor distances longer than 8in or in very
noisy environments. Twisted-pair cable lengths can be
between 6ft and 12ft before noise introduces excessive
errors. For longer distances, the best solution is a
shielded twisted pair like that used for audio micro-
phones. For example, Belden #8451 works well for dis-
tances up to 100ft in a noisy environment. At the
device, connect the twisted pair to DXP and DXN and
the shield to GND. Leave the shield unconnected at the
remote sensor.
For very long cable runs, the cable’s parasitic capaci-
tance often provides noise filtering, so the 2200pF
capacitor can often be removed or reduced in value.
Cable resistance also affects remote-sensor accuracy.
For every 1
Ω of series resistance, the error is approxi-
mately +1/2°C.
Low-Power Standby Mode
Standby mode reduces the supply current to less than
10µA by disabling the ADC, the control loop, and the
fan driver. Enter hardware standby mode by forcing
STBY low, or enter software standby by setting the
RUN/STOP bit to 1 in the Configuration Byte register.
Hardware and software standbys are very similar; all
data is retained in memory, and the SMB interface is
alive and listening for SMBus commands. The only dif-
ference is that in software standby mode, the one-shot
command initiates a conversion. With hardware stand-
by, the one-shot command is ignored. Activity on the
SMBus causes the device to draw extra supply current.
Driving
STBY low overrides any software conversion
command. If a hardware or software standby command
is received while a conversion is in progress, the con-
version cycle is interrupted, and the temperature regis-
ters are not updated. The previous data is not changed
and remains available.
SMBus Digital Interface
From a software perspective, the MAX6660 appears as
a set of byte-wide registers that contain temperature
data, alarm threshold values, and control bits. The
device responds to the same SMBus slave address for
access to all functions.
The MAX6660 employs four standard SMBus protocols:
Write Byte, Read Byte, Send Byte, and Receive Byte
(Figures 3, 4, 5) to program the alarm thresholds, read
the temperature data, and read and write to all fan con-
trol loop registers. The shorter Receive Byte protocol
allows quicker transfers, provided that the correct data
register was previously selected by a Read Byte
instruction. Use caution with the shorter protocols in
multimaster systems, since a second master could
overwrite the command byte without informing the first
master.
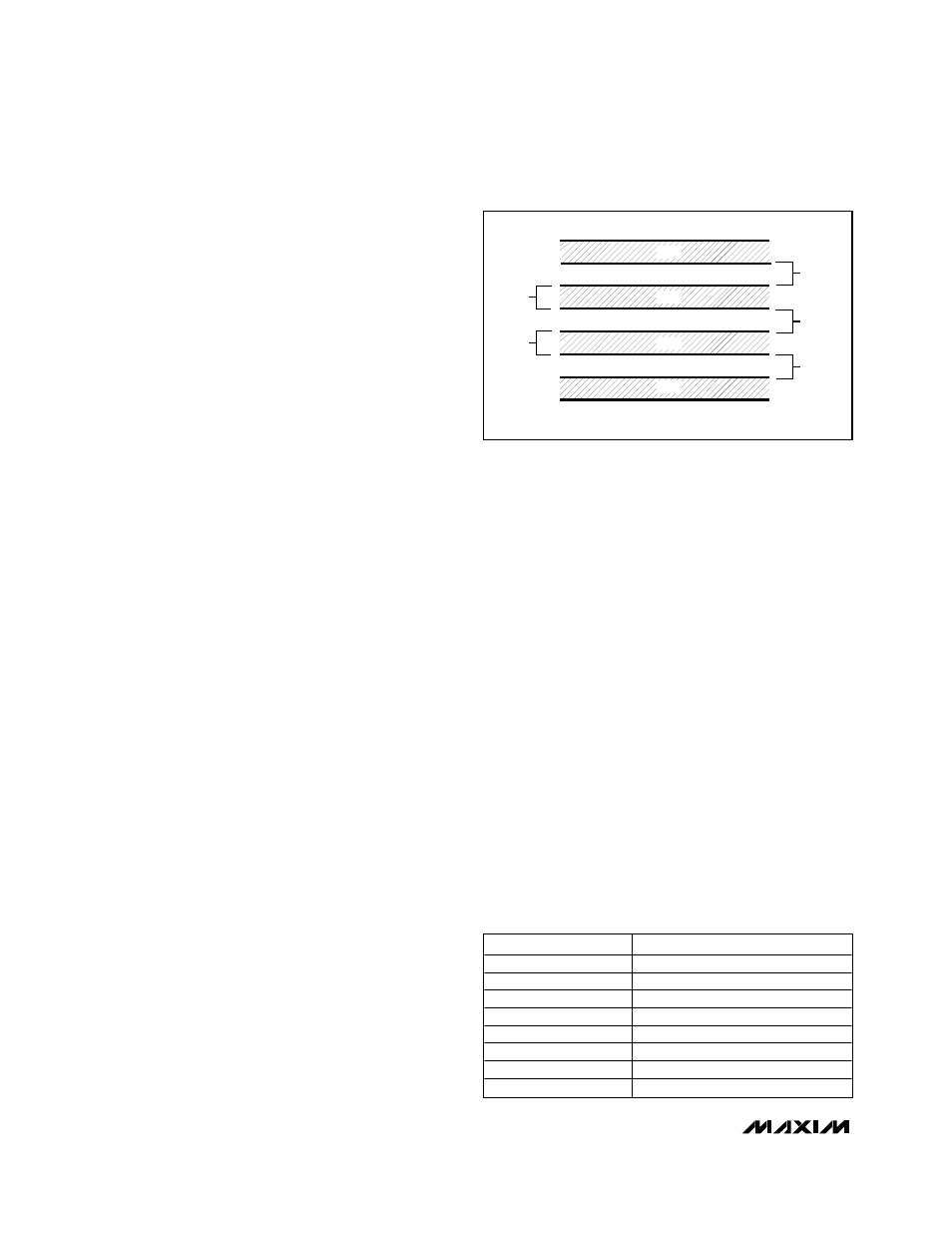
Figure 2. Recommended DXP-DXN PC Trace
MINIMUM
10mils
10mils
10mils
10mils
GND
DXN
DXP
GND
TEMP. (
°C)
DIGITAL OUTPUT
+127
0111 1111 111
+125.00
0111 1101 000
+25
0001 1001 000
+0.125
0000 0000 001
0
0000 0000 000
-0.125
1111 1111 111
-25
1110 0111 111
-40
1101 1000111
Table 2. Temperature Data Format (Two’s
Complement)