Table 3. read format for alert response address – Rainbow Electronics MAX6660 User Manual
Page 11
MAX6660
Remote-Junction Temperature-Controlled
Fan-Speed Regulator with SMBus Interface
______________________________________________________________________________________
11
Alert Response Address
The SMBus Alert Response interrupt pointer provides
quick fault identification for simple slave devices that
lack the complex, expensive logic needed to be a bus
master. Upon receiving an ALERT interrupt signal, the
host master can broadcast a Receive Byte transmission
to the Alert Response slave address (see Slave
Addresses section). Then, any slave device that gener-
ated an interrupt attempts to identify itself by putting its
own address on the bus (Table 3).
The Alert Response can activate several different slave
devices simultaneously, similar to the I
2
C™ General
Call. If more than one slave attempts to respond, bus
arbitration rules apply, and the device with the lower
address code wins. The losing device does not gener-
ate an Acknowledge and continues to hold the
ALERT
line low until cleared. (The conditions for clearing an
alert vary depending on the type of slave device.)
Successful completion of the Alert Response protocol
clears the interrupt latch, provided the condition that
caused the alert no longer exists. If the condition still
exists, the device reasserts the ALERT interrupt at the
end of the next conversion.
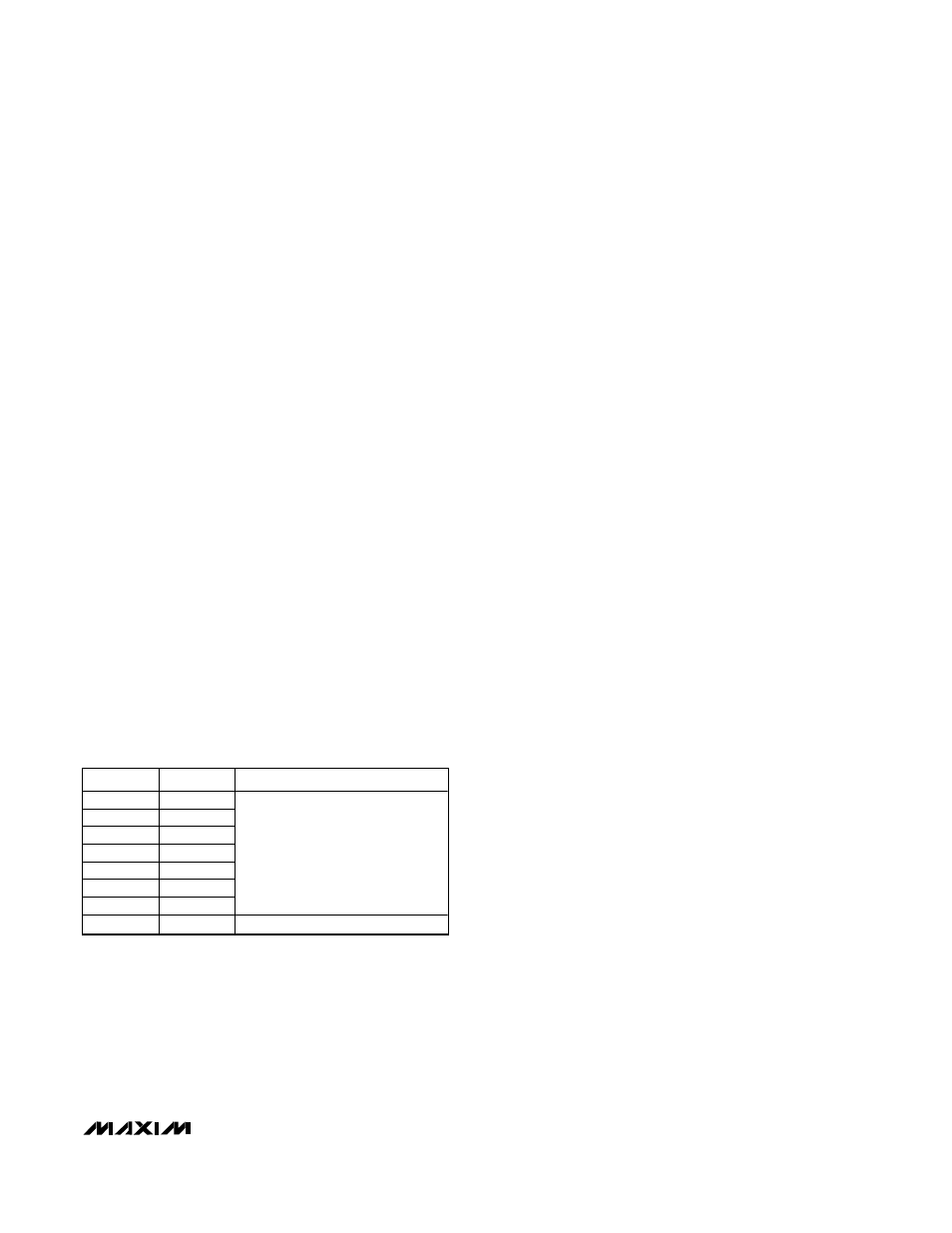
Table 3. Read Format for Alert Response
Address
Command Byte Functions
The 8-bit Command Byte register (Table 4) is the mas-
ter index that points to the other registers within the
MAX6660. The register’s POR is 0000 0000, so that a
receive byte transmission (a protocol that lacks the
command byte) that occurs immediately after POR
returns the current remote temperature data.
One-Shot
The one-shot command immediately forces a new conver-
sion cycle to begin. In software standby mode
(RUN/STOP bit = high), a new conversion is begun, after
which the device returns to standby mode. If a conversion
is in progress when a one-shot command is received, the
command is ignored. If a one-shot command is between
conversions, in autoconvert mode (RUN/STOP bit = low),
a new conversion begins immediately.
Configuration Byte Functions
The Configuration Byte register (Table 5) is used to
mask (disable) the
ALERT signal to place the device in
software standby mode, to change the polarity of
OVERT, to set MAX6660 to thermal open/closed-loop
mode, to inhibit the
OVERT signal, to mask OVERT out-
put, and to clear the
ALERT signal. The MAX6660 has a
write protection feature (bit 4) that prohibits write com-
mands to bits 6–3 of the Configuration register. It also
prohibits writes to the T
MAX
, T
HYST
, and Fan
Conversion Rate registers.
Status Byte Functions
The status byte (Table 6) reports several fault condi-
tions. It indicates when the fan driver transistor of the
MAX6660 has overheated and/or is thermal shutdown,
when the temperature thresholds, T
LOW
and T
HIGH
,
have been exceeded, and whether there is an open cir-
cuit in the DXP-DXN path. The register also reports the
state of the
ALERT and OVERT lines and indicates
when the fan driver is fully on. The final bit in the Status
register indicates when a fan failure has occurred.
After POR, the normal state of the flag bits is zero,
assuming no alert or overtemperature conditions are
present. Bits 2 through 6 of the Status register are
cleared by any successful read of the Status register,
unless the fault persists. The
ALERT output follows the
status flag bit. Both are cleared when successfully
read, but if the condition still exists, the
ALERT is
reasserted at the end of the next conversion.
The MAX6660 incorporates collision avoidance so that
completely asynchronous operation is allowed between
SMBus operations and temperature conversions.
When autoconverting, if the T
HIGH
and T
LOW
limits are
close together, it is possible for both high-temperature
and low-temperature status bits to be set, depending
on the amount of time between status read operations.
In these circumstances, it is best not to rely on the sta-
tus bits to indicate reversals in long-term temperature
changes. Instead, use a current temperature reading to
establish the trend direction.
Manufacturer and Device ID Codes
Two ROM registers provide manufacturer and device
ID codes. Reading the manufacturer ID returns 4D,
which is the ASCII code M (for Maxim). Reading the
device ID returns 09h, indicating the MAX6660 device.
If READ WORD 16-bit SMBus protocol is employed
BIT
NAME
FUNCTION
7 (MSB)
ADD7
6
ADD6
5
ADD5
4
ADD4
3
ADD3
2
ADD2
1
ADD1
Provide the current MAX6660
slave address
0 (LSB)
1
Logic 1
I
2
C is a trademark of Philips Corp.