Rainbow Electronics MAX6660 User Manual
Page 14
MAX6660
Remote-Junction Temperature-Controlled
Fan-Speed Regulator with SMBus Interface
14
______________________________________________________________________________________
Power-up defaults include:
•
Interrupt latch is cleared.
•
ADC begins autoconverting.
•
Command register is set to 00h to facilitate quick
internal Receive Byte queries.
•
T
HIGH
and T
LOW
registers are set to +127°C and
-55°C, respectively.
•
T
HYST
and T
MAX
are set to +95°C and +100°C,
respectively.
Fan Control
The fan-control function can be divided into the thermal
loop, the fan-speed-regulation loop (fan loop), and the
fan-failure sensor. The thermal loop sets the desired fan
speed based on temperature while the fan-speed-regu-
lation loop uses an internally divided down reference
oscillator to synchronize to and regulate the fan speed.
The fan-speed-regulation loop includes the fan driver
and the tachometer sensor. The fan-failure sensor pro-
vides a FAN FAIL alarm that signals when the fan
tachometer count is greater than the fan tachometer
value, which corresponds to a fan going slower than
the limit. The fan driver is an N-channel, 4
Ω, 320mA
MOSFET with a 16V maximum V
DS
whose drain termi-
nal connects to the low side of the fan. The tachometer
sensor (TACH IN) of the MAX6660 is driven from the
tachometer output of the fan and provides the feed-
back signal to the fan-speed-regulation loop for control-
ling the fan speed. For fans without tachometer outputs,
the MAX6660 can generate its own tachometer pulses
by monitoring the commutating current pulses (see
Commutating Current Pulses section).
Thermal Loop
Thermal Closed Loop
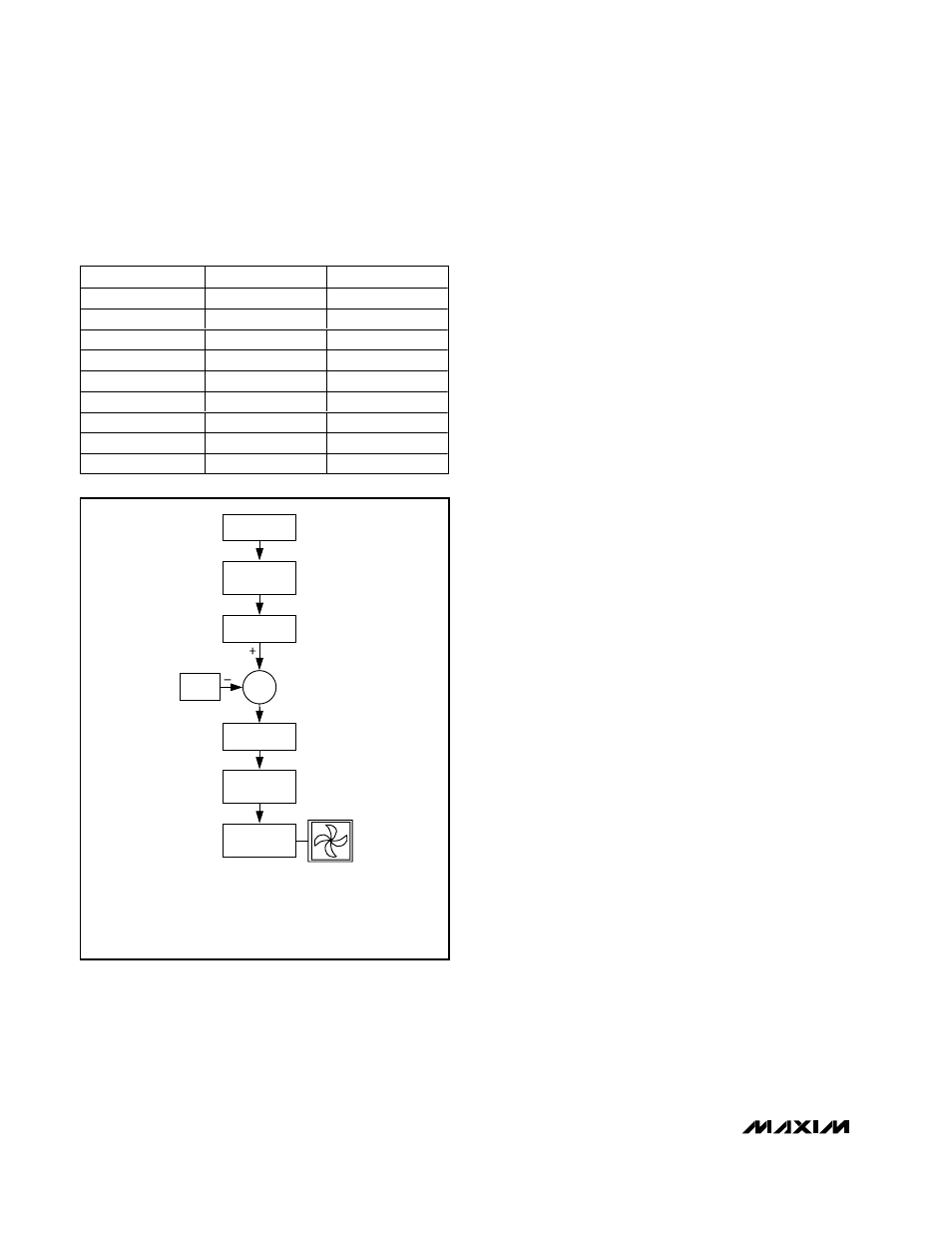
The MAX6660 can be operated in a complete closed-
loop mode, with both the thermal and fan loops closed,
where the remote-diode sensor temperature directly
controls fan speed. Setting bit 3 of the Configuration
register to zero places the MAX6660 in thermal closed
loop (Figure 6). The remote-diode temperature sensor
is updated every 250ms. The value is stored in a tem-
porary register (TEMPDATA) and compared to the pro-
grammed temperature values in the T
HIGH
, T
LOW
,
T
HYST
, T
MAX
, and T
FAN
registers to produce the error
outputs
OVERT and ALERT.
The Fan Conversion Rate (FCR) register (Table 8) can
be programmed to update the TEMPDATA every 0.25s
ADD0
ADD1
ADDRESS
GND
GND
0011 000
GND
High-Z
0011 001
GND
V
CC
0011 010
High-Z
GND
0101 001
High-Z
High-Z
0101 010
High-Z
V
CC
0101 011
V
CC
GND
1001 100
V
CC
High-Z
1001 101
V
CC
V
CC
1001 110
Table 7. POR Slave Address Decoding
(ADD0 and ADD1)
UPDATE
FCR
0.25s TO 16s
TEMPDATA
FSC
T
FAN
FG
4/5/6 BITS
FAN CONTROL
DRIVER CIRCUIT
Figure 6. MAX6660 Thermal Loop