Input instances 70 and 71 detail – Toshiba Multiprotocol Ethernet Interface for Toshiba G9/VFAS1 Adjustable Speed Drives ASD-G9ETH User Manual
Page 73
72
ICC
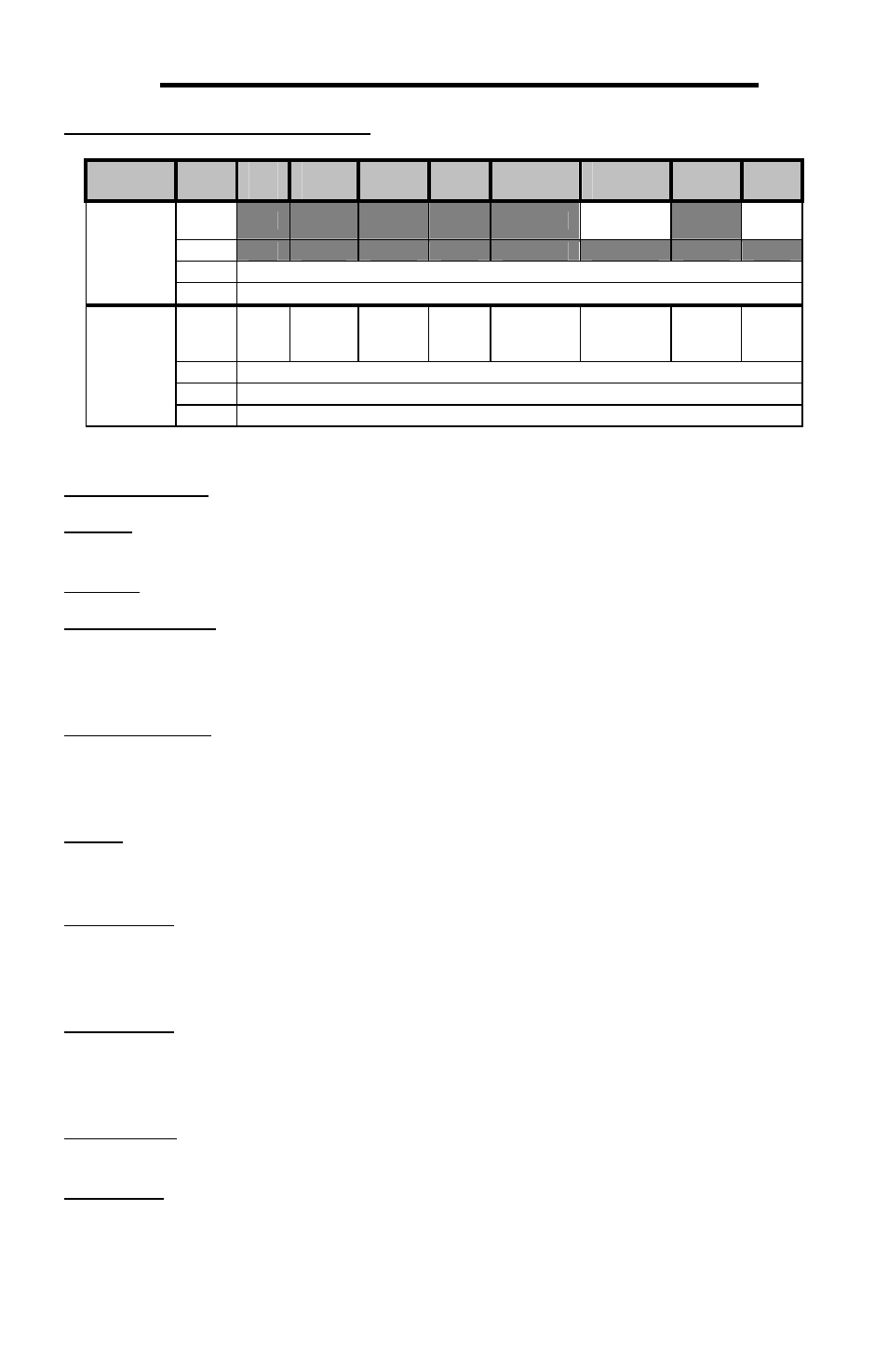
Input Instances 70 and 71 Detail
Instance
Byte
Bit
7
Bit
6
Bit
5
Bit
4
Bit
3
Bit
2
Bit
1
Bit
0
70
0
Running
1
Fault
1
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
71
0
At
Ref
Ref
From
Net
Ctrl
From
Net
Rdy
Running
2 (REV)
Running
1 (FWD)
Warn Fault
1 Drive
State
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
Mapping Detail
Faulted: Inverter fault signal (0=not faulted, 1=faulted). Maps to inverter register
1302 (status 1 word), bit 0.
Warning: This bit is not used (it is always 0).
Running1 (FWD): Running forward status signal (0=not running forward, 1=running
forward). Maps to inverter register 1302 (status 1 word), bits 9 and 10. The
Running1 bit will be 1 whenever inverter register 1302 bit 9 (direction) is 0 and bit 10
(running/stopped) is 1, and will be 0 otherwise.
Running2 (REV): Running reverse status signal (0=not running reverse, 1=running
reverse). Maps to inverter register 1302 (status 1 word), bits 9 and 10. The
Running2 bit will be 1 whenever inverter register 1302 bit 9 (direction) is 1 and bit 10
(running/stopped) is 1, and will be 0 otherwise.
Ready: Inverter ready signal (0=not ready, 1=ready). The Ready bit will be 1
whenever the Drive State attribute (see below) is in the Ready, Enabled or Stopping
state.
CtrlFromNet: Inverter command reference status (0=command reference is not from
network, 1=command reference is from network). Maps to inverter register 1007, bit
15 (command priority). In other words, CtrlFromNet always reflects the status of the
NetCtrl attribute.
RefFromNet: Inverter speed reference status (0=speed reference is not from
network, 1=speed reference is from network). Maps to inverter register 1007, bit 14
(frequency priority). In other words, RefFromNet always reflects the status of the
NetRef attribute.
AtReference: Up-to-speed signal (0=not up-to-speed, 1=up-to-speed). Maps to
inverter register 1350 (status 3 word), bit 12 (RCH).
Drive State: Indicates the current state of the Control Supervisor Object state
machine. Refer to the ODVA Ethernet/IP specification (object library) for detailed
information on the Control Supervisor Object state machine.