2 essential pid (pid3), Expanded functions – Toshiba PROSEC T3H User Manual
Page 48
46
PROSEC T3H
2. Expanded Functions
2.4.2 Essential PID (PID3)
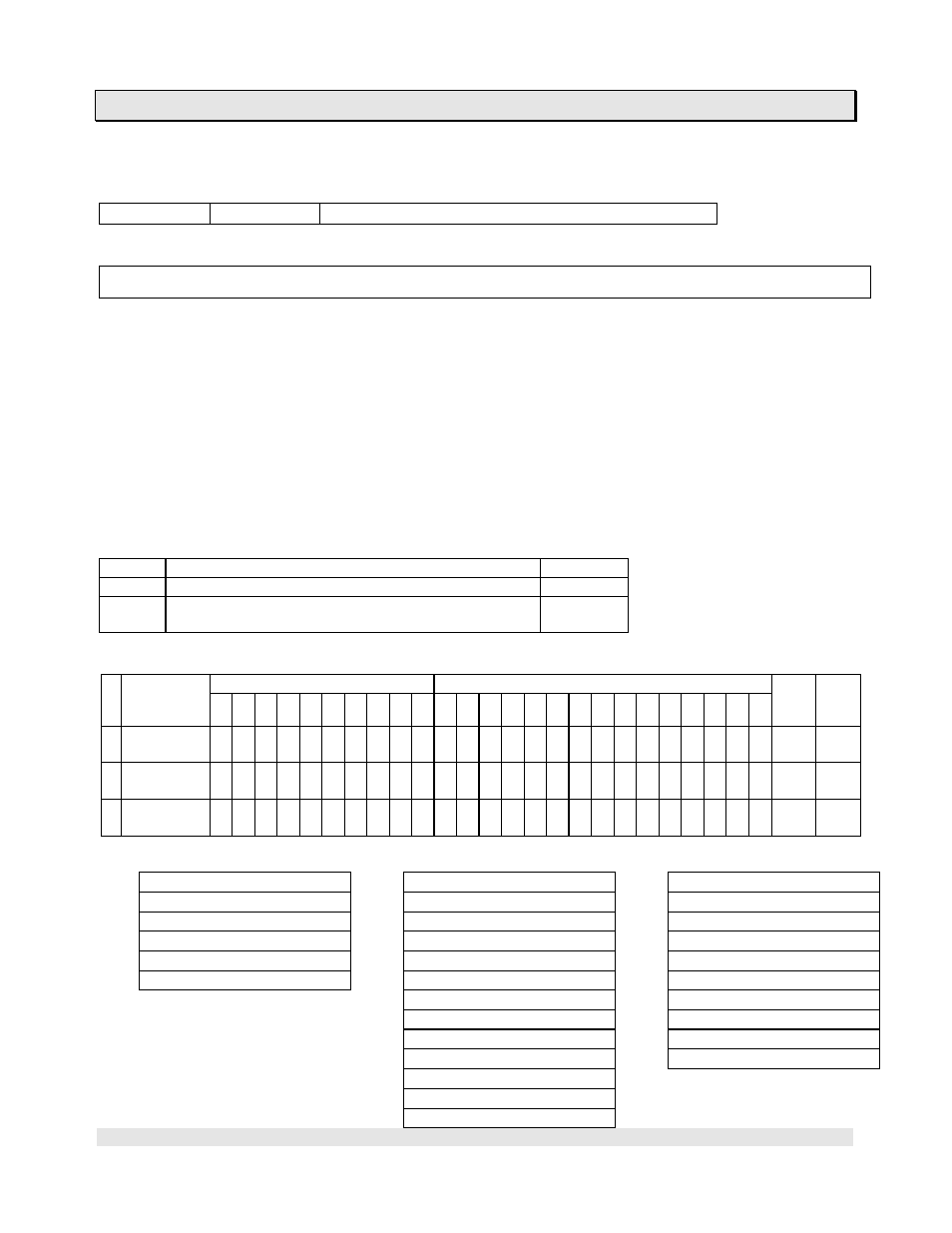
FUN 156
PID3
Essential PID
Expression
Input
─[ A PID3 B
→
C ]
─ Output
Function
Performs PID (Proportional, Integral, Derivative) control which is a fundamental method of feed-back control.
(Pre-derivative real PID algorithm)
This PID3 instruction has the following features.
•
For derivative action, incomplete derivative is used to suppress interference of high-frequency noise and to
expand the stable application range,
•
Controllability and stability are enhanced in case of limit operation for MV, by using digital PID algorithm
succeeding to benefits of analog PID.
•
Auto, cascade and manual modes are supported in this instruction.
•
Digital filter is available for PV.
•
Direct / reverse operation is selectable.
Execution condition
Input Operation Output
OFF Initialization
OFF
ON
Execute PID every setting interval
ON when
execution
Operand
Name
Device
Register
Con-
Index
X Y S L R Z T. C. I O X
W
Y
W
S
W
L
W
R
W
W T C D F I
W
O
W
I J K
stant
A Top of input
data
√
√
√
√
√
√
√
√
√
√
√
B Top of
parameter
√
√
√
√
√
√
√
√
√
√
√
C Top of
output data
√
√
√
√
√
√
√
√
√
√
Input data
Control parameter
Output data
A Process input value
PVC
B Proportional gain
K
P
C Manipulation value
MV
A+1 A-mode set value
ASV
B+1 Integral time
T
I
C+1 Last error
e
n-1
A+2 C-mode set value
CSV
B+2 Derivative time
T
D
C+2 Last derivative value
D
n-1
A+3 M-mode MV input
MMV
B+3 Dead-band
GP
C+3 Last PV
PV
n-1
A+4 MV tracking input
TMV
B+4 A-mode initial SV
ISV
C+4 Last SV
SV
n-1
A+5 Mode setting
MODE
B+5 Input filter constant
FT
C+5 Integral remainder
Ir
B+6 ASV differential limit
DSV
C+6 Derivative remainder
Dr
B+7 MMV differential limit DMMV
C+7 Internal MV
MV
n
A-mode: Auto mode
B+8 Initial status
STS
C+8 Internal counter
C
C-mode: Cascade mode
B+9 MV upper limit
MH
C+9 Control interval
∆∆∆∆
t
M-mode: Manual mode
B+10 MV lower limit
ML
B+11 MV differential limit
DMV
B+12 Control interval setting
n