Dynamixel dx-series, 2. read_data, 3. reg_write and action – Robotis Dynamixel DX-117 User Manual
Page 20: 3-1. reg_write
19
DYNAMIXEL
DX-Series
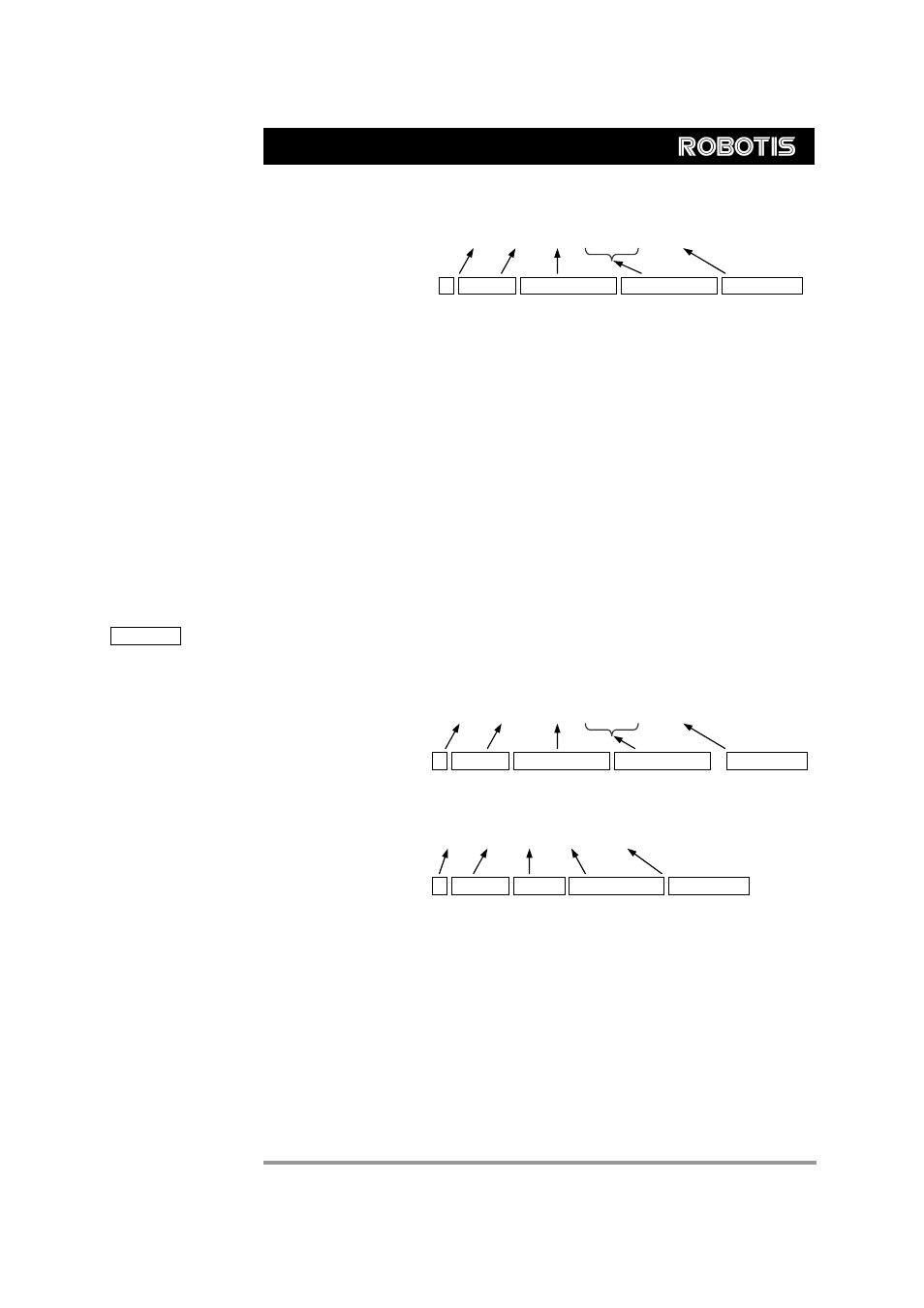
Instruction Packet : 0XFF 0XFF 0XFE 0X04 0X03 0X03 0X01 0XF6
ID LENGTH INSTRUCTION PARAMETERS CHECKSUM
Because it was transmitted by Broadcast ID(0XFE), no return status packet.
4-2. READ_DATA
Function
Read data from the Control Table of Dynamixel
Length
0X04
Instruction
0X02
Parameter1
Starting Address of Data to Read
Parameter2
length of Data to Read
Example 2
Read the internal temperature of the Dynamixel with ID=1
Read 1 byte from the Address 0x2B values of the Control Table
Instruction Packet : 0XFF 0XFF 0X01 0X04 0X02 0X2B 0X01 0XCC`
ID LENGTH INSTRUCTION PARAMETERS .. CHECKSUM
The returned Status Packet will be as follows
Status Packet : 0XFF 0XFF 0X01 0X03 0X00 0X20 0XDB
ID LENGTH ERROR PARAMETER1 CHECKSUM
The value read is 0x20.The current Dynamixel’s internal temperature is approximately 32 (0X20).
℃
4-3. REG_WRITE and ACTION
4-3-1. REG_WRITE