Dynamixel dx-series – Robotis Dynamixel DX-117 User Manual
Page 11
10
DYNAMIXEL
DX-Series
0XFF 0XFF
Two 0XFF bytes indicate the start of a packet.
ID
ID of the Dynamixel which is returning the packet.
LENGTH
The length of the Status Packet. The value is “Parameter number (N) + 2”.
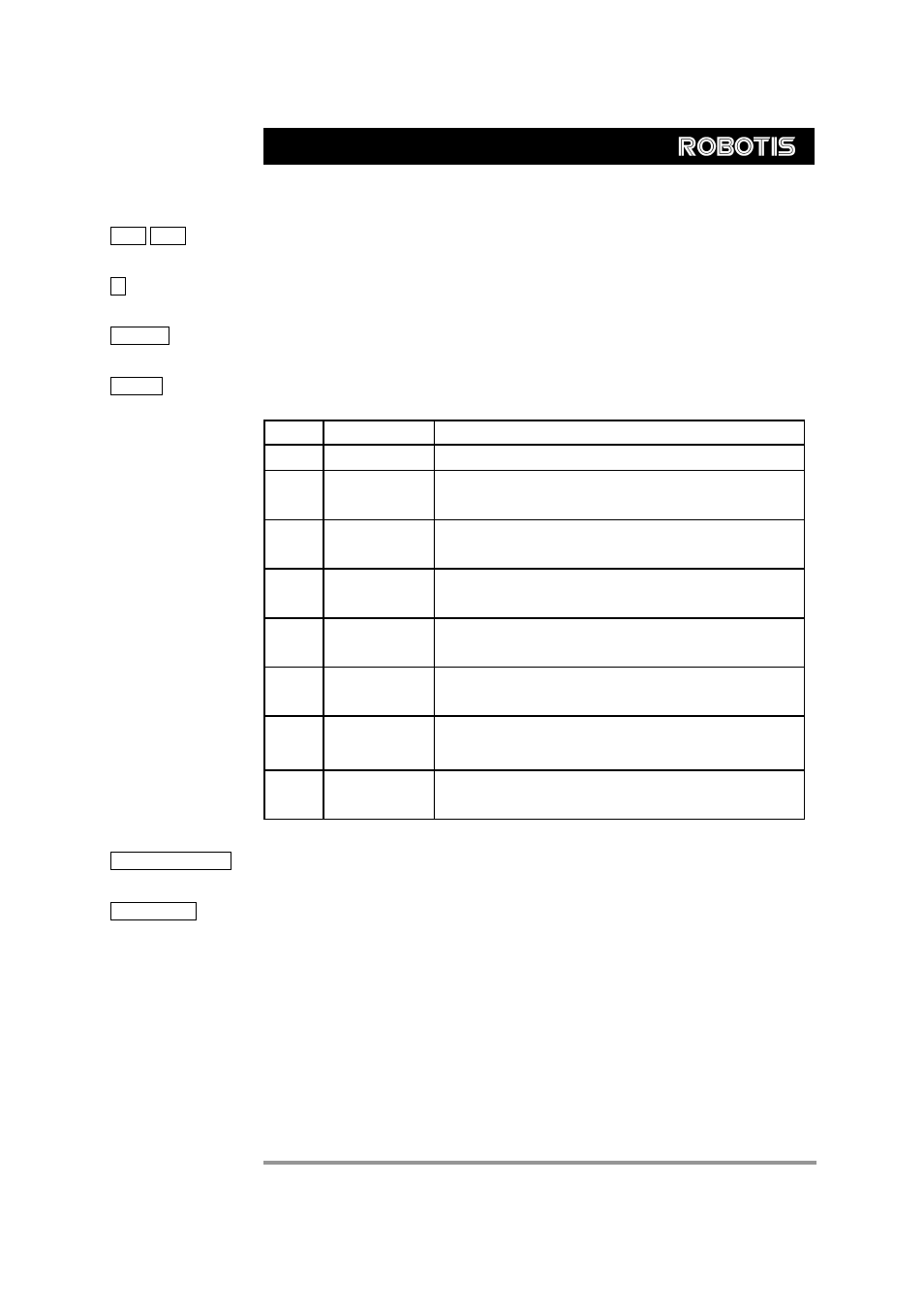
ERROR
Dynamixel communication error flags. The meaning of each bit is as follows:
PARAMETER0…N
Used when additional information is required.
CHECK SUM
SUM Calculation method of ‘Check Sum’is as follows:
Check Sum = ~( ID + Length + Instruction + Parameter1 + … Parameter N )
If the calculated value is bigger than 255, the lower byte becomes the checksum.
~ represents the Not or complement operation
Bit
Name
Details
Bit 7
0
-
Bit 6
Instruction Error
Set to 1 if an undefined instruction is given without the
reg_write instruction.
Bit 5
Overload Error Set to 1 if the specified torque can't control the load.
Bit 4
Checksum Error
Set to 1 if the checksum of the intruction packet is
incorrect
Bit 3
Range Error
Set to 1 if the instruction is out of the usage range.
Bit 2
Overheating
Error
Set as 1 if the internal temperature of Dynamixel is out of
the operative range as set in the control table.
Bit 1
Angle Limit Error
Set as 1 if the goal position is set outside of the range
between CW Angle Limit and CCW Angle Limit
Bit 0
Input Voltage
Error
Set to 1 if the voltage is out of the operative range set in
the control table.