RoboteQ AX2850 User Manual
Page 175
AX2550 Motor Controller User’s Manual
175
Programmable Parameters List
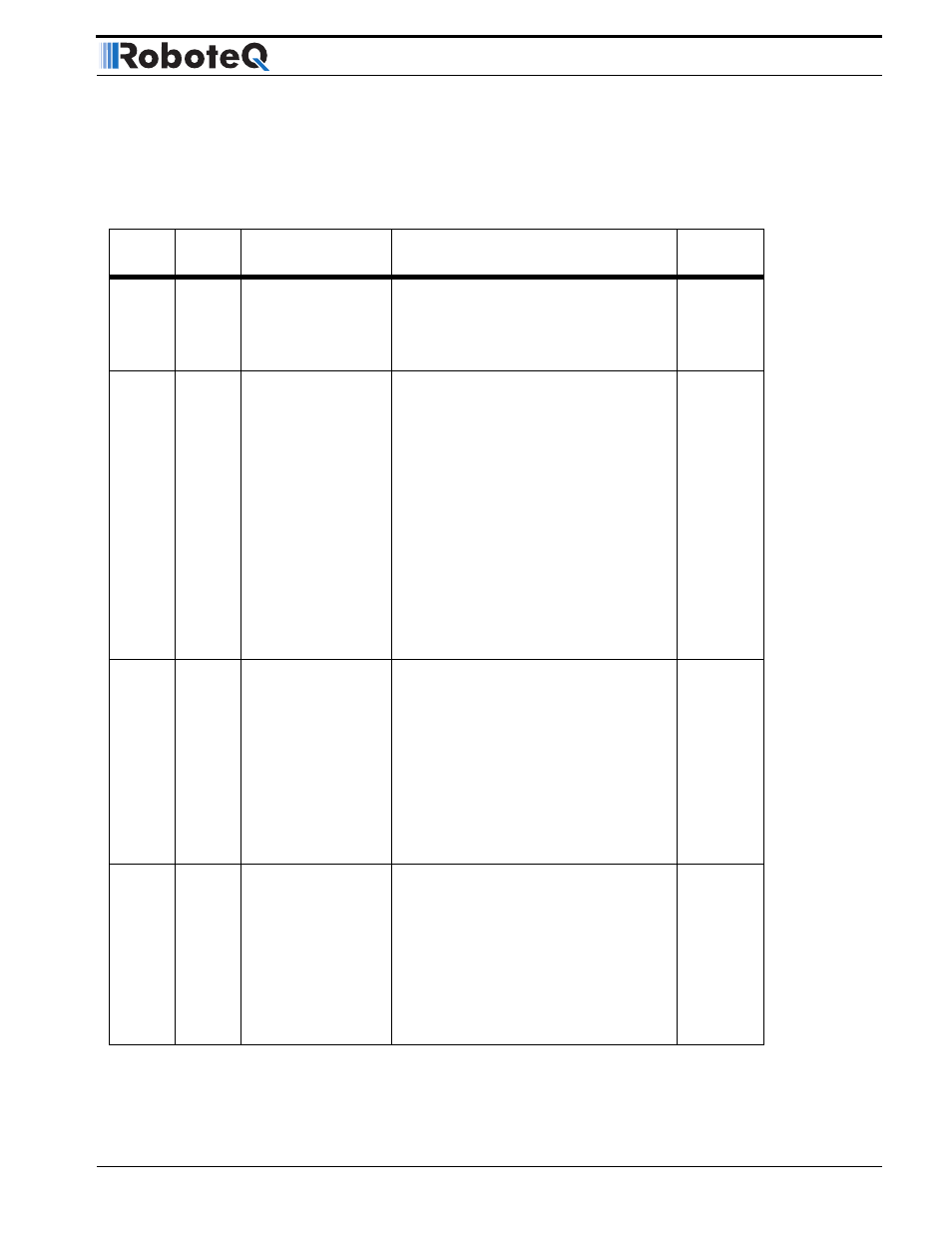
This table shows only the parameters that can be programmed using the switches
and display. Other less commonly used parameters exist and are only accessible and pro-
grammable using the Configuration Utility (page 177) or the RS232 commands (page 143).
TABLE 35. Parameters accessible using the controller’s switches and display
Order
Letter Description
Possible
Values
(default)
See
pages
1
I
Input Command
mode:
(0) = R/C Radio mode (default)
1 = RS232 full duplex, no watchdog
2 = RS232 half duplex, with watchdog
3 = Analog mode
2
C
Motor Control mode
(0) = Separate A, B, speed control, open
loop (default)
1 = Mixed A & B, speed control, open loop
For safety reasons, the modes below
cannot be selected using the switches.
2 = Speed control on A, open loop. Posi-
tion control on B
3 = A & B Position control
4 = Separate A, B, speed control, closed
loop
5 = Mixed A & B, speed control, closed
loop
6 = Speed control on A, closed loop. Posi-
tion control on B
3
A
Amp limit
0 = 30A
1 = 45A
2 = 60A
3 = 75A
4 = 90A
(5) = 105A default
6 = 120A
Amps may be set with a finer resolution
using the PC utility
4
S
Acceleration
0 = very slow
1 = slow
(2) = medium (default)
3 = medium
4 = fast
5 = fastest
Acceleration may be set with a finer resolu-
tion using the PC utility