English, Troubleshooting – KTM Super Duke 990s User Manual
Page 45
ENGLISH
44
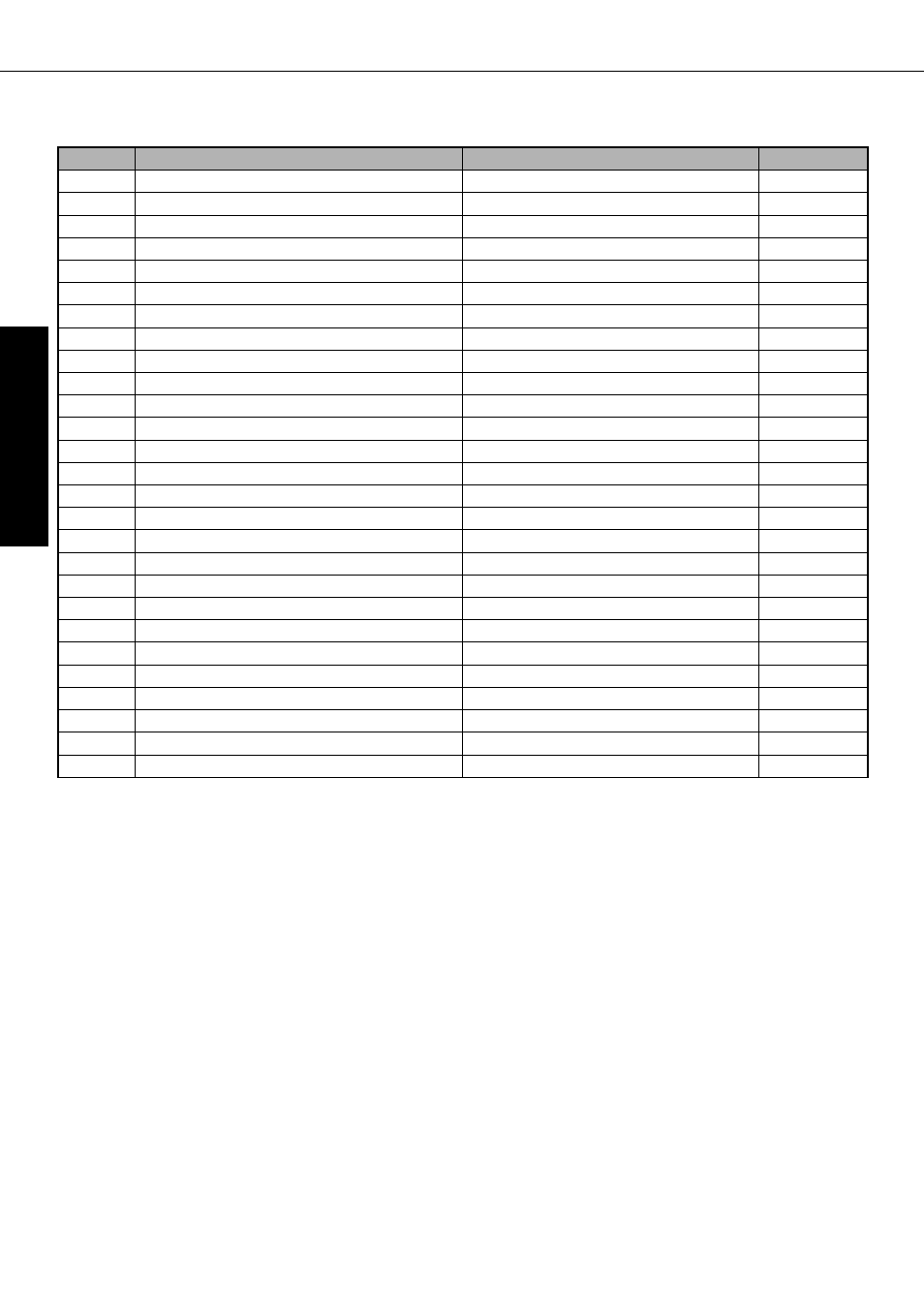
TROUBLESHOOTING
»
BLINK CODE SIGNAL / COMPONENT
ERROR DESCRIPTION
ENGINE
02
Pulse generator
Malfunction
Stalls
06
Throttle sensor
Output signal too low /high
Continues to run
07
Sensor for 2nd throttle valve
Output signal too low /high
Continues to run
09
Intake manifold air pressure for sensor rear cylinder Output signal too low /high
Continues to run
11
Intake manifold air pressure sensor for front cylinder Output signal too low /high
Continues to run
12
Coolant temperature sensor
Output signal too low /high
Continues to run
13
Air temperature sensor
Output signal too low /high
Continues to run
14
Ambient air pressure sensor
Output signal too low /high
Continues to run
15
Tilt angle sensor
Output signal too low /high
Continues to run
17
Lambda probe for rear cylinder
Malfunction
Continues to run
18
Lambda probe for front cylinder
Malfunction
Continues to run
24
Control unit voltage supply
Malfunction
Continues to run
25
Side stand switch
Short circuit to ground
Continues to run
33
Injection nozzle for rear cylinder
Malfunction
Stalls
34
Injection nozzle for front cylinder
Malfunction
Stalls
37
Ignition coil for rear cylinder
Malfunction
Stalls
38
Injection coil for front
Malfunction
Stalls
41
Fuel pump relay
Short circuit to ground / positive
Stalls
45
Lambda probe heater for rear cylinder
Short circuit to ground / positive
Continues to run
46
Lambda probe heater for front cylinder
Short circuit to ground / positive
Continues to run
49
Idle control motor
Malfunction
Continues to run
53
Purge valve for carbon canister
Short circuit to ground / positive
Continues to run
54
Secondary air valve
Short circuit to ground / positive or interruption Continues to run
65
EEPROM error
Malfunction
Continues to run
68
Vacuum hose for front cylinder is defective
Malfunction
Continues to run
69
Vacuum hose for rear cylinder is defective
Malfunction
Continues to run
72
Stepper motor for 2nd throttle valve
Malfunction
Continues to run
The blink code indicates which component is affected by an error. This allows the error to be identified if no diagnosis tool is
available.