Honeywell HERCULINE 2000 User Manual
Page 48
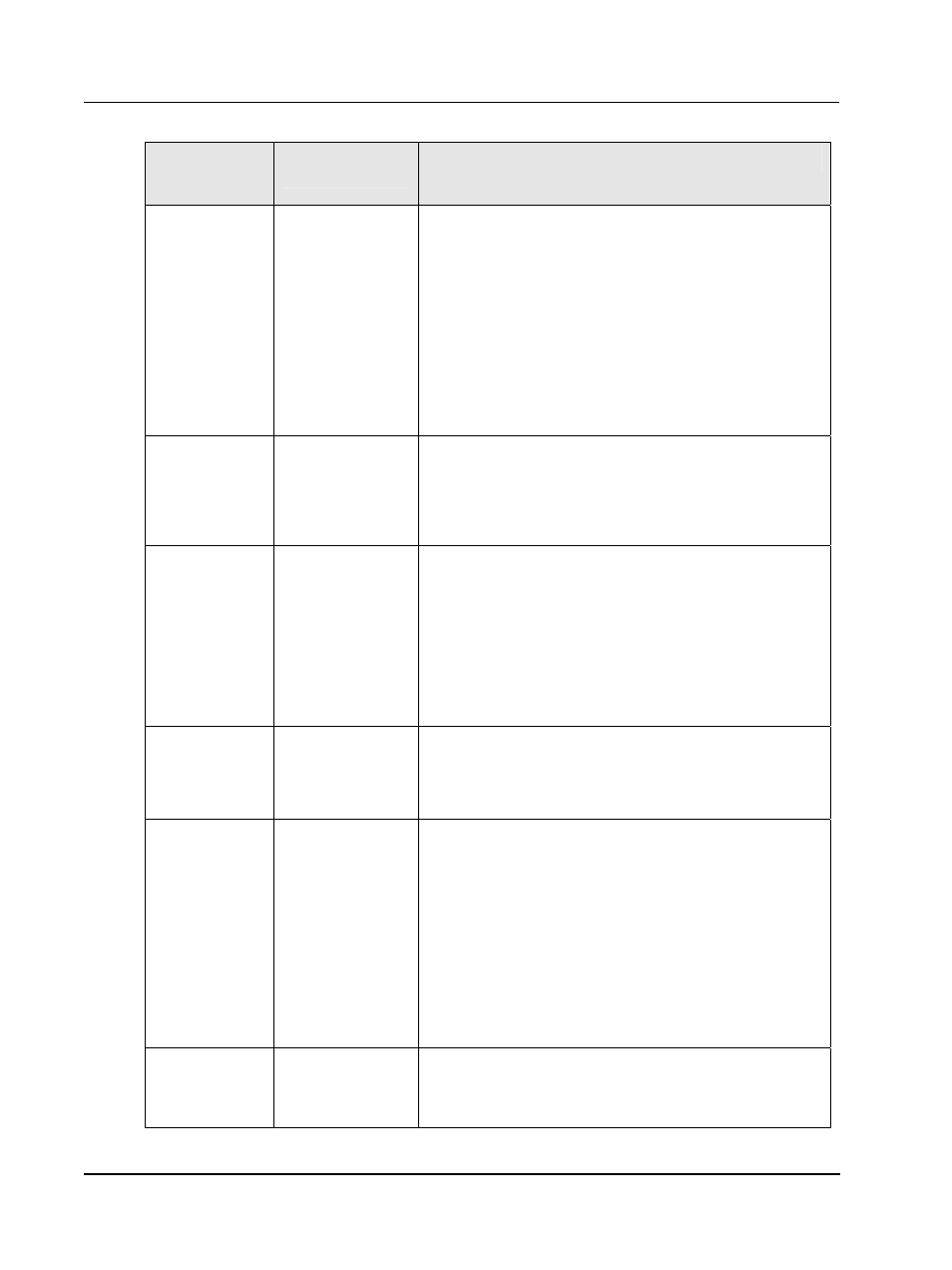
Set Up and Calibration Procedures
Input Set Up Group
40
HercuLine™ 2000 Series Actuator - Installation, Operation and Maintenance Manual
Revision 7
7/08
Actuator Lower
Display
Prompt
Selections or
Range of Setting
Parameter Definition/PDA HercuLink Prompt
FILTYP
NONE
SPIK
S+LP
LPAS
default = LPAS
INPUT FILTER TYPE
— Allows the selection of a software
digital input filter to smooth the input signal.
Spike
— Selects spike filter to remove transients in the input
signal when actuator is installed in noisy environments.
Spike plus Low Pass
— Selects spike and low pass filtering.
*
Allows setting of lag time constant for low pass filter.
Low Pass
— Selects low pass filter.
*
Allows setting of lag time constant.
NOTE: When Input Type (R_SP or S_90) is selected, Input
Filter Type = NONE.
LPFILT *
0 to 50.00
(in seconds)
default = 0.5
LAG TIME CONSTANT
— (Filter Type S+LP or LPAS only)
Allows you to set the first order lag time constant of the low
pass filter when selected. Range is from 0 to 50 seconds.
NOTE: When Input Type (R_SP or S_90) is selected, Low
Pass Filter Value is not configurable.
Direct
CCW
CW
default = CCW
ACTUATOR ROTATION
—This selection determines the
direction of rotation of the actuator shaft.
Counterclockwise
rotation
Clockwise
rotation
NOTE: Actuator rotation is the direction of the output shaft
when facing the end of the shaft and refers to the direction of
rotation on increasing signal.
Dband
0.2
to 5.0
(in percent of
span)
default = 0.5
INPUT DEADBAND
— Specifies an adjustable gap that is the
difference between the setpoint value and the value at which
the motor energizes. Deadband is set in percent of full span.
FSFTYPH
LAST
UP
DOWN
USER
default = UP
FAILSAFEHI TYPE
—Selects the motor position you want
the actuator to go to when input signal is above the high end
range value.
NOTE: Failsafe condition occurs when the input exceeds its
high end range value by 3%,
Last Position
—Actuator motor remains at last position.
Up
—Actuator motor moves to full scale value.
Down
—Actuator motor moves to zero value.
User selected value
—Actuator motor moves to a customer-
defined value.
*
Allows setting of failsafehi input value.
FsFVALH *
0
to 100%
default = 100
FAILSAFEHI INPUT VALUE
—(FailsafeHI Type USER only)
Selects the motor position you want the actuator to go to
when input signal is above the high end range value.
Range is from 0 to 100%.