Yaskawa CM092 User Manual
Page 8
Yaskawa Electric America, Inc. –
www.yaskawa.com
IG.G5HHP.26 Page 8 of 13
Date: 10/12/09 Rev: 09-10
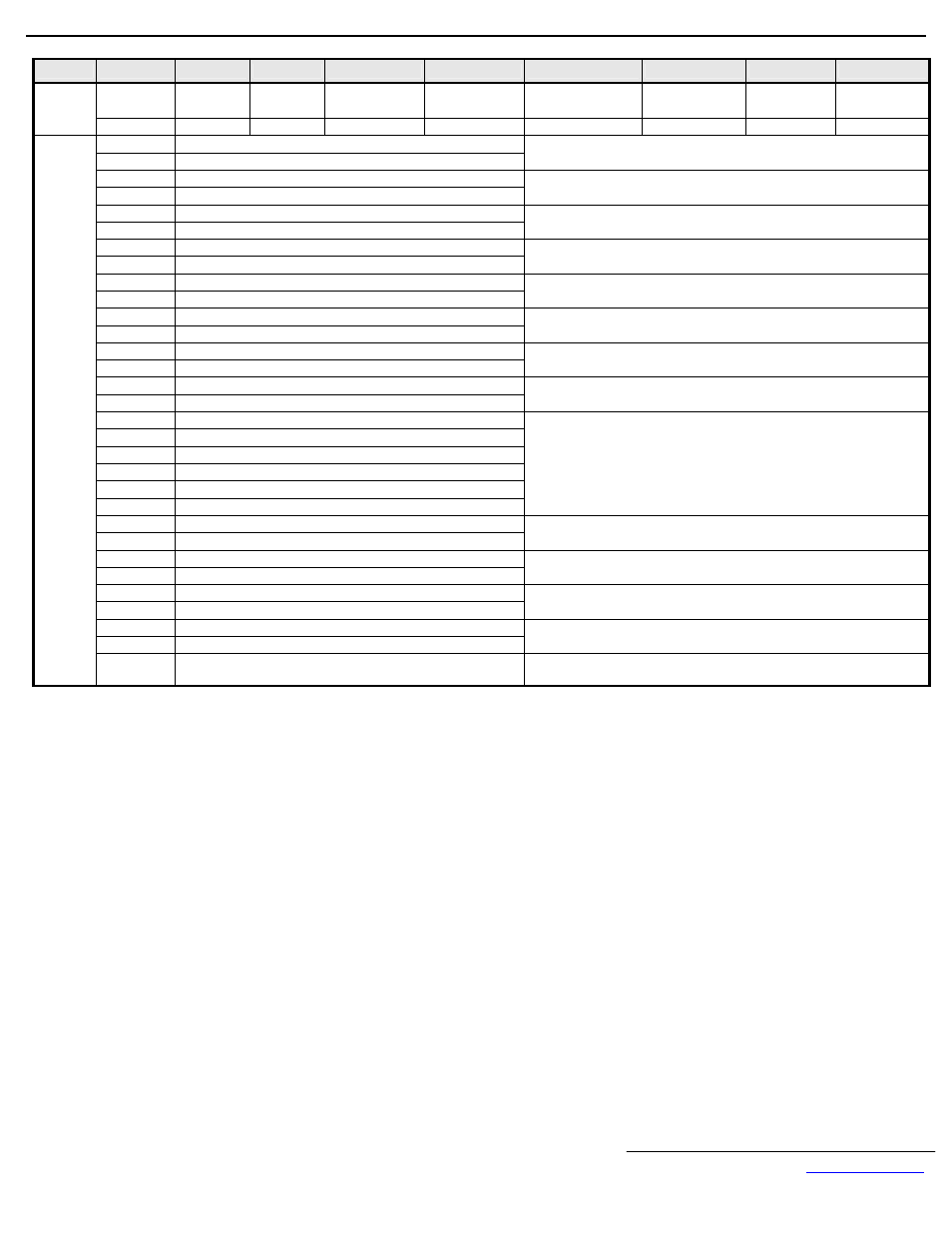
Yaskawa Standard Speed/Torque Output Instance 155 (9Bh)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0 Fault
Alarm Ready
Speed
Agree Reset
Running Reverse
Zero Speed
Running
Forward
Instance
1
Zero Servo
—
Terminals 20-50
Terminals 19-50
Terminals 53-57
Local/Remote
Undervoltage
OPE Error
2h
Output Speed (Low Byte) [scaled by o1-03]
3h
Output Speed (High Byte) [scaled by o1-03]
Monitor Parameter U1-05
4h
Torque Reference (Low Byte) [0.1%]
5h
Torque Reference (High Byte) [0.1%]
Monitor Parameter U1-09
6h
PG Count Value (PG-X2) (Low Byte)
7h
PG Count Value (PG-X2) (High Byte)
Encoder pulse count from PG-X2 option when in flux vector mode. There is no
associated drive parameter.
8h
Frequency Reference (Low Byte) [scaled by o1-03]
9h
Frequency Reference (High Byte) [scaled by o1-03]
Monitor Parameter U1-01
10h (0A)
Output Frequency (Low Byte) [scaled by o1-03]
11h (0B)
Output Frequency (High Byte) [scaled by o1-03]
Monitor Parameter U1-02
12h (0C)
Output Current (Low Byte) [0.1A or 0.01A]
13h (0D)
Output Current (High Byte) [0.1A or 0.01A]
Monitor Parameter U1-03
14h (0E)
Inverter AI Terminal 39 Output (Low Byte)
15h (0F)
Inverter AI Terminal 39 Output (High Byte)
Monitor Parameter U1-16
16h (10)
Main Circuit DC Bus Voltage (Low Byte)
17h (11)
Main Circuit DC Bus Voltage (High Byte)
Monitor Parameter U1-07
18h (12)
Error Alarm Signal 1 (Low Byte)
19h (13)
Error Alarm Signal 1 (High Byte)
20h (14)
Error Alarm Signal 2 (Low Byte)
21h (15)
Error Alarm Signal 2 (High Byte)
22h (16)
Error Alarm Signal 3 (Low Byte)
23h (17)
Error Alarm Signal 3 (High Byte)
For details refer to the following table on page 9
24h (18)
Inverter AI Terminal 42 Input (Low Byte)
25h (19)
Inverter AI Terminal 42 Input (High Byte)
Monitor Parameter U1-17
26h (1A)
Inverter DI Terminals 9~16 Input (Low Byte)
27h (1B)
Inverter DI Terminals 9~16 Input (High Byte)
Monitor Parameter U1-10
28h (1C)
Inverter AI Terminal 36 Input (Low Byte)
29h (1D)
Inverter AI Terminal 36 Input (High Byte)
Monitor Parameter U1-15
30h (1E)
PG Counter (Ch2) (PG-W2) (Low Byte)
31h (1F)
PG Counter (Ch2) (PG-W2) (High Byte)
Encoder pulse count from PG-W2 option when in flux vector mode and using
motor 2. Speed detection PG counter value.
155
32h (20h) –
39h (29h)
Not Used