Yaskawa CM092 User Manual
Page 6
Yaskawa Electric America, Inc. –
www.yaskawa.com
IG.G5HHP.26 Page 6 of 13
Date: 10/12/09 Rev: 09-10
CM092 EtherNet/IP Option Supported Class Summary
01 – Identity Object
02 – Message Router Object
04 – Assembly Object
06 – Connection Manager Object
28 – Motor Object
29 – Control Supervisor Object
2A – AC Drive Object
64 – Yaskawa Command Object
65 – Yaskawa Status Object
F5 – TCP/IP Object
F6 – Ethernet Link Object
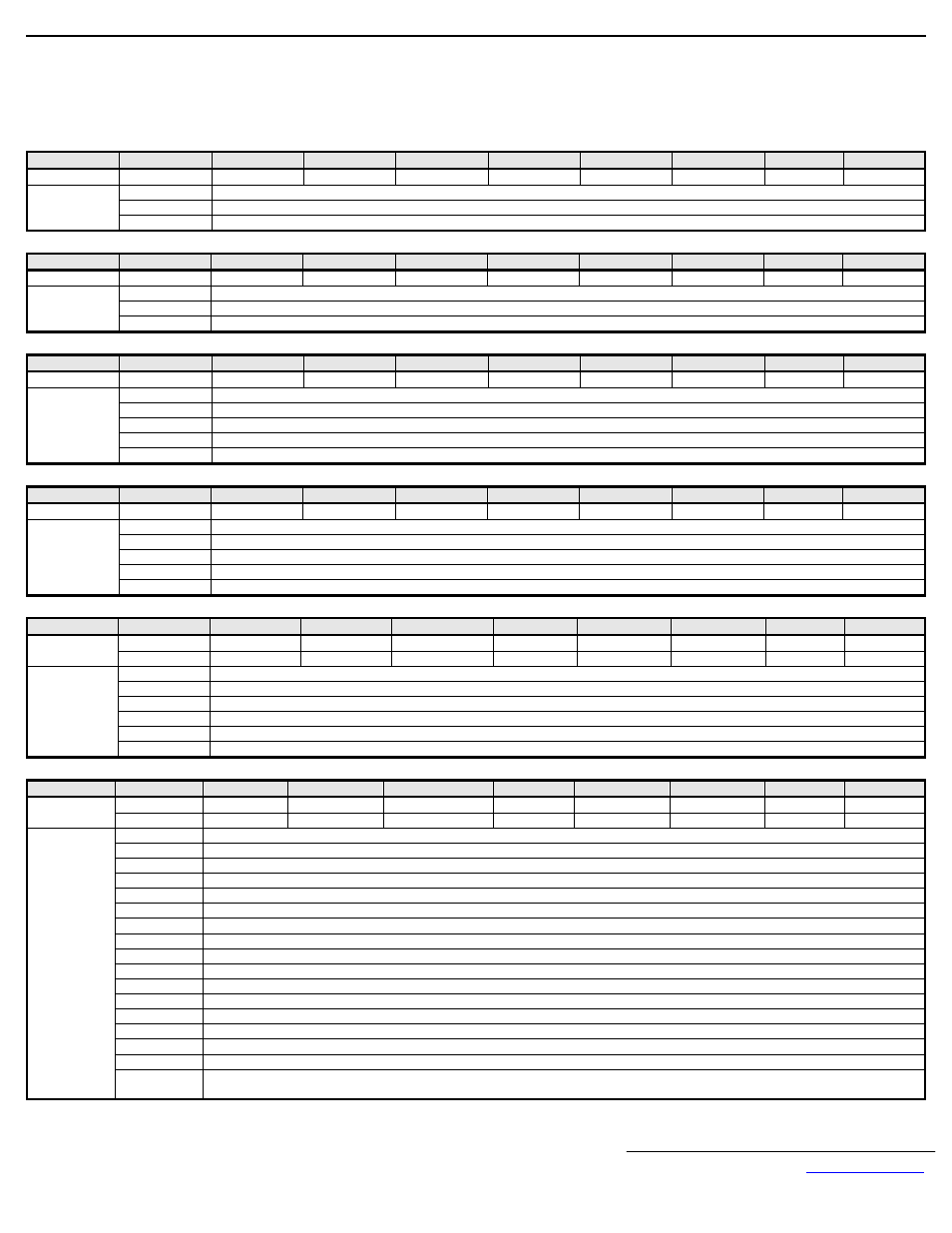
Supported Input Instances for Assembly Object Class 04
Basic Speed Control Input Instance 20 (14h)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Instance
0 — — — — —
Fault
Reset
—
Run
Forward
1 —
2
Speed Reference (Low Byte) [Scaled by parameter o1-03]
20
3
Speed Reference (High Byte) [Scaled by parameter o1-03]
Extended Speed Control Input Instance 21 (15h)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Instance
0 — — — — —
Fault
Reset
Run
Reverse
Run
Forward
1 —
2
Speed Reference (Low Byte) [Scaled by parameter o1-03]
21
3
Speed Reference (High Byte) [Scaled by parameter o1-03]
Basic Speed Control Input Instance 22 (16h)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Instance
0 — — — — —
Fault
Reset
—
Run
Forward
1 —
2
Speed Reference1 (Low Byte) [Scaled by parameter o1-03]
3
Speed Reference1 (High Byte) [Scaled by parameter o1-03]
4
Torque Reference (Low Byte) [0.1%]
22
5
Torque Reference (High Byte) [0.1%]
Extended Speed Control Input Instance 23 (17h)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Instance
0 — — — — —
Fault
Reset
Run
Reverse
Run
Forward
1 —
2
Speed Reference1 (Low Byte) [Scaled by parameter o1-03]
3
Speed Reference1 (High Byte) [Scaled by parameter o1-03]
4
Torque Reference (Low Byte) [0.1%]
23
5
Torque Reference (High Byte) [0.1%]
Yaskawa Standard Speed/Torque Control Input Instance 101 (65h)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
Terminal 16
Terminal 15
Terminal 14
Terminal 13
Terminal 12
Terminal 11
Run Reverse Run Forward
Instance
1
Terminals 20-50 Terminals 19-50 Terminals 53-57
—
—
—
Fault Reset External Fault
2
Speed Reference1 (Low Byte) [Scaled by parameter o1-03]
3
Speed Reference1 (High Byte) [Scaled by parameter o1-03]
4
Torque Reference (Low Byte) [0.1%]
5
Torque Reference (High Byte) [0.1%]
6
Torque Compensation (Low Byte) [0.1%]
101 (65h)
7
Torque Compensation (High Byte) [0.1%]
Yaskawa Standard Speed/Torque Control Input Instance 115 (73h)
Input
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
Terminal 16
Terminal 15
Terminal 14
Terminal 13
Terminal 12
Terminal 11
Run Reverse Run Forward
Instance
1
Terminals 20-50 Terminals 19-50
Terminals 53-57
—
—
—
Fault Reset External Fault
2h
Speed Reference (Low Byte) [scaled by parameter o1-03]
3h
Speed Reference (High Byte) [scaled by parameter o1-03]
4h
Torque Reference (Low Byte) [0.1%]
5h
Torque Reference (High Byte) [0.1%]
6h
Torque Compensation (Low Byte) [0.1%]
7h
Torque Compensation (High Byte) [0.1%]
8h Not
Used
9h Not
Used
10h (0Ah)
Not Used
11h (0Bh)
Not Used
12h (0Ch)
Analog Input Terminal 36 (Low Byte)
13h (0Dh)
Analog Input Terminal 36 (High Byte)
14h (0Eh)
Analog Input Terminal 39 (Low Byte)
15h (0Fh)
Analog Input Terminal 39 (High Byte)
16h (10h)
Digital Output (Low Byte) U1-11
17h (11h)
Digital Output (High Byte) U1-11
115
18h (12h) –
39h (27h)
Not Used