6 alarms – Tecfluid LU Series User Manual
Page 17
17
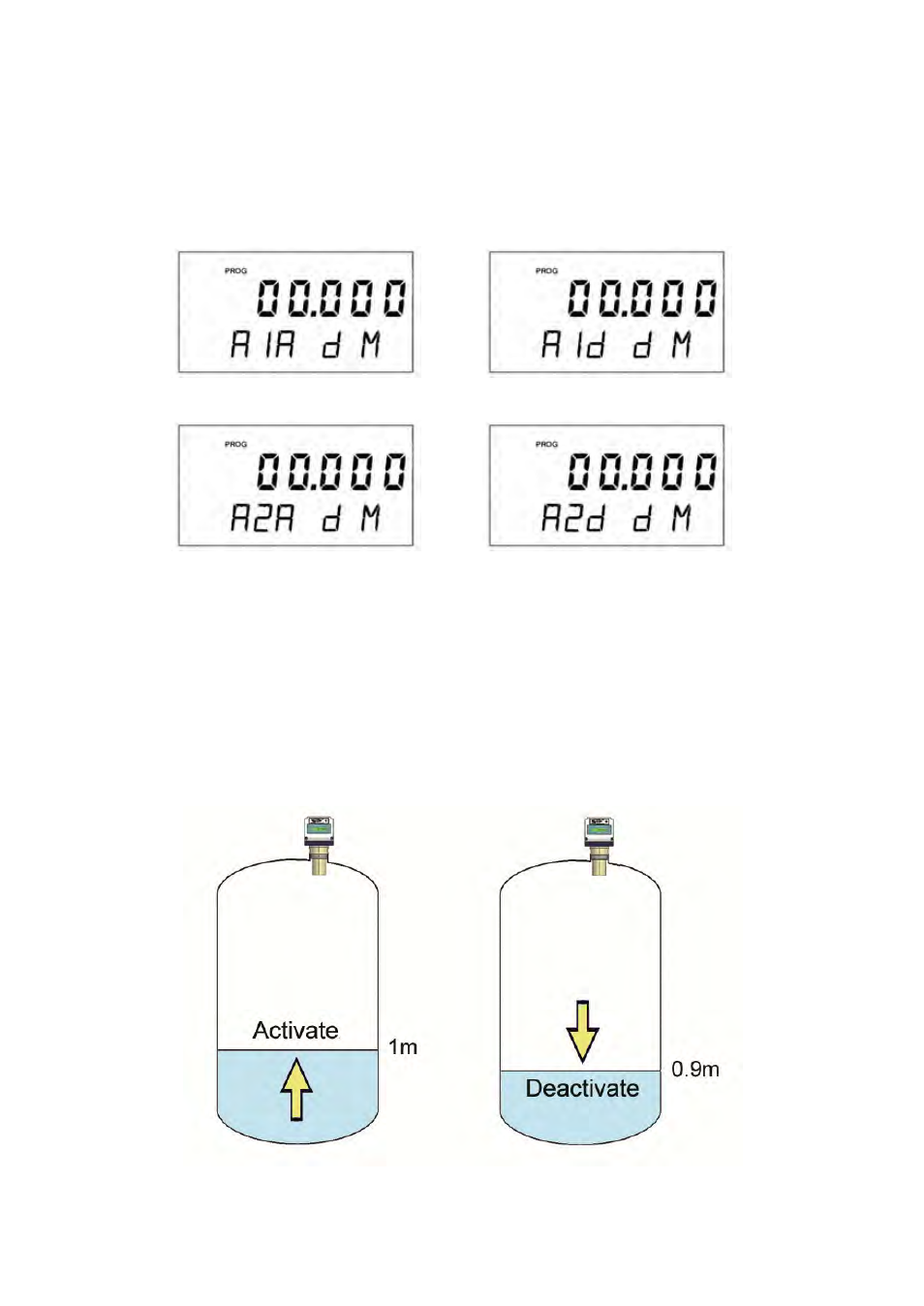
5.6 Alarms
In these screens we select the actuation points of the two alarms and the level of
hysteresis. By level of hysteresis we understand the difference between activation and
deactivation of the output. In some cases the level of a vessel is not stable due to waves
generated by agitators, etc. To avoid that an alarm output is continuously moving from
activate to deactivate state, we must program the points of connection and disconnection.
Example
Suppose that the instrument is working in level mode. If the activation point is
programmed to 1 m and the deactivation point is programmed to 0.9 m, when the level is
zero the output will be off. When the level reaches a height of 1 m the output will go on
and it will not go off until the level falls below 0.9 m.
Alarm 1. Point of activation
Alarm 2. Point of activation
Alarm 1. Point of deactivation
Alarm 2. Point of deactivation
- AMD For 2000 Series (4 pages)
- AMO For 6000 Series (4 pages)
- AMR For 6000 Series (4 pages)
- AMM For 6000 Series (8 pages)
- LT-AMD (4 pages)
- TR420 (8 pages)
- AD Series (4 pages)
- TH6 For M21 Series (12 pages)
- TH5 For DP Series (12 pages)
- AMM For DP Series (8 pages)
- FLOMAT Series (12 pages)
- FLOMID-MX (20 pages)
- XT5D (24 pages)
- MX4H (24 pages)
- FLOMID Series (8 pages)
- MX4 For FLOMAT Series (56 pages)
- LC Series (4 pages)
- LC40 Series (8 pages)
- LC-40 ADF (4 pages)
- MX4 For FLOMID Series (64 pages)
- LD61 (8 pages)
- LD60 (8 pages)
- LD61N (8 pages)
- LD61R (12 pages)
- LP Series (12 pages)
- TR2420 (12 pages)
- LT-APR (4 pages)
- LTL-AMM (4 pages)
- LTL-APR (4 pages)
- LTL-ADF (4 pages)
- VH35 AISI-316 (4 pages)
- MC01 4-20 mA input (12 pages)
- MT-02 (9 pages)
- MT03L (32 pages)
- MT03F (40 pages)
- CH420L (8 pages)
- CH420R (12 pages)
- CH420P (12 pages)
- CIP (4 pages)
- CIP II (8 pages)
- DFD-2 E (8 pages)
- APTM44 (6 pages)
- CI-420 (8 pages)