Guralp Systems CMG-1T User Manual
Page 11
Operator’s Guide CMG-1T Ocean Bottom
Seismometer
September, 1999, Issue C
Section 1, Page 3
Individually each sensors outputs can be further zeroes within a range of
±
2.5
degrees. The horizontal sensors are levelled (or mass position output zeroed)
by tilting the sensor bases, in the case of the vertical sensor the sensor boom
position is controlled by the movement of the tip of the main load bearing
spring.
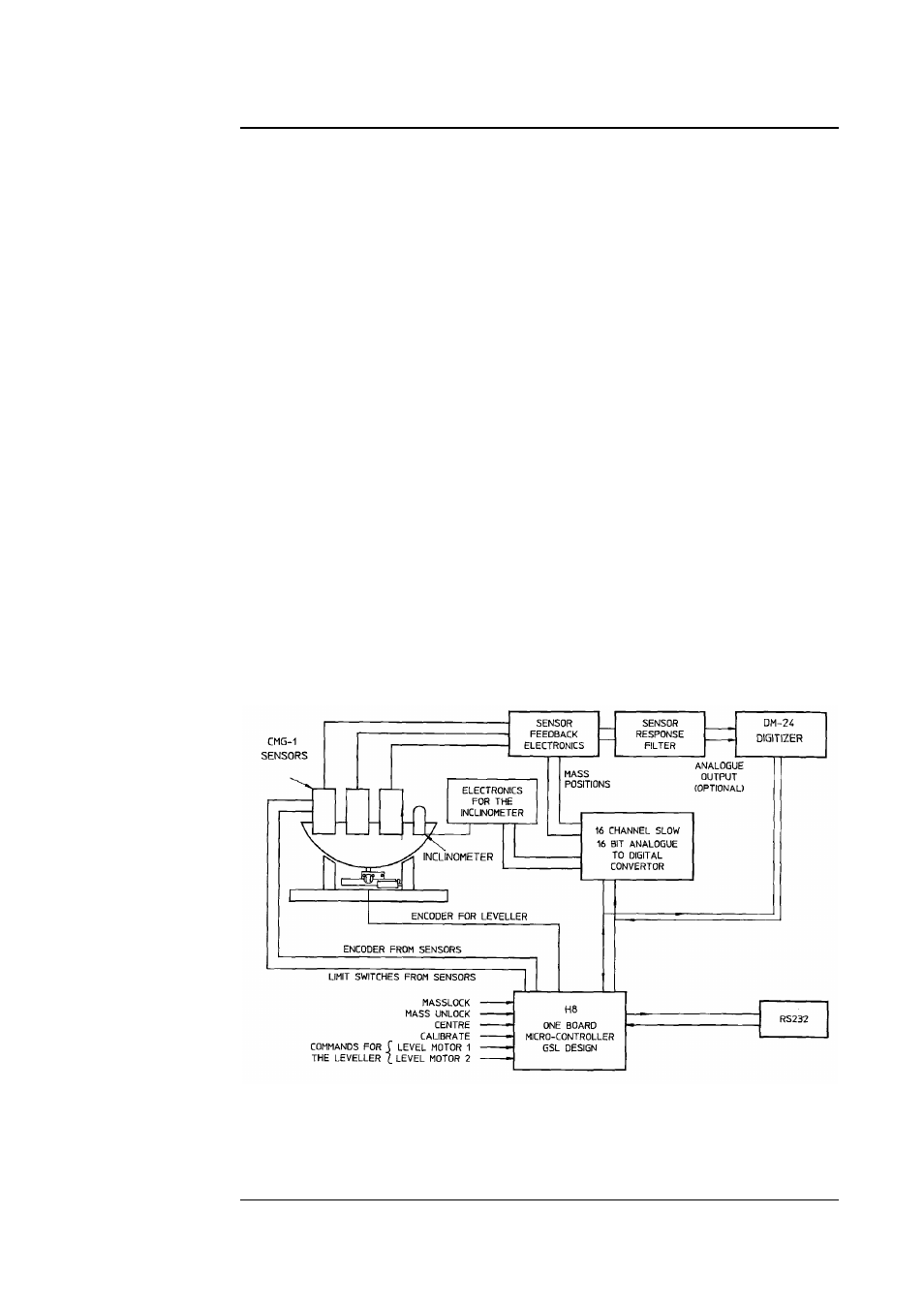
The sensor command functions are controlled with a single chip micro-
controller, type H8 (Hitachi). The sensor function lock, unlock, centre and
levelling bowl functions are all initiated with command words instructed
through the system serial communication port.
A two axis inclinometer is used to measure the tilt of the sensor levelling bowl
in the North/South and East/West directions. The inclinometer is interfaced to
the micro-controller which ensures levelling of the sensor levelling bowl with a
single English command “LEVEL”.
A two axis inclinometer is used to measure the tilt of the sensor base in the
North/South and East/West directions.
The commands to operate the seismometer control functions, the digitizers and
the data from the digitizers is communicated with a serial communication line.
In the case where an internal digitizer is used, the sensor outputs are digitized
with a 24-bit digitizer and the data packets are time stamped at the source. A
complete block diagram of the ocean bottom sensor is given below.