2 issuing control commands – Flowserve DDC-100 Modbus Direct-to-Host User Manual
Page 28
50
DDC-100 Direct-to-Host Programming Guide
FCD LMAIM4019-00
FCD LMAIM4019-00
DDC-100 Direct-to-Host Programming Guide
51
5) Field unit register 10, bit 10 will only report network ESD when the field unit network ESD
parameter is set to any value but Ignore.
6) Field unit register 9, bit 5 (Valve Jammed) will only be active when the actuator is moving the
valve and the torque switch is tripped.
7) In MOV (Motor-Operated Valve) mode, Field unit registers 9, 10, 11 bits are a value of 0 when
false. A value of 1 indicates true.
8) In MOV mode, field unit register 12 low-byte bits are a value of 0 when false. A value of 1
indicates true.
9) In MOV mode, field unit register 12 bit 11 is default inverted, by default, to a value of 1 on false
and 0 on true. The remaining bits in the high-byte are set, by default, to a value of 0 on false
and 1 on true.
6.2 Issuing Control Commands
The following checklist is provided for issuing control commands:
1) The normal polling process should be interrupted to issue any control commands to a field
unit on the network. This interruption should take place after the Host receives the response
from a previously issued query. Once the field unit control command has been issued and the
acknowledge returned, the normal polling process should resume.
2) Prior to issuing commands to an actuator-mounted field unit:
• Verify successful communication. This is accomplished via the normal
polling process.
• Verify actuator is in Remote mode.
• Verify the actuator is capable of movement.
a) Combined Fault bit is not a value of 1.
b) Actuator is not at desired position. (Do not send open command
if actuator is in open position.)
c) Verify that the desired direction of travel does not have a torque
switch fault.
3) Prior to issuing commands to an I/O Module-style field unit:
• Verify successful communication. This is accomplished via the normal
polling process.
• When using 2 relays to control a single device, always disengage the
first relay before engaging the second relay.
4) Commands can be issued with either the Modbus function code 05 or 06. Either command is
capable of opening or closing the actuator or engaging or disengaging field unit physical relays
1 - 6. If the actuator is configured for intermediate position control, Modbus function code 06
must be used to move the actuator to the desired position.
5) An actuator configured for intermediate position control (“move-to”) should be issued position
commands between 2 and 98% of open. Issue open or close commands for 0 and 100% of
open.
6) Commands issued to the field unit should never be repeated if the command acknowledgment
is received from the field unit. Commands should be reissued only when the field unit does
not acknowledge receipt of the command. Repeated commands sent to the field unit will result
in increased network traffic that increases network scan times. Also, repeating acknowledged
commands can cause erratic field unit operation (e.g., stop).
7) The field unit will automatically stop (disengage contactor) when the actuator reaches the full
open or close position. There is no requirement for issuing a Stop command when the actuator
reaches the open or close limit switch.
8) A Stop command can be used to stop the actuator in mid-travel. When the actuator has
stopped in mid-travel (between the open and close limit switches), the field unit register 9 bit
02 (Stopped) will be true (1).
9) There is no requirement to first issue a Stop command when changing directions from open to
close or close to open. When the field unit receives the command to change directions, the field
unit will first disengage the contactor (stop the actuator), then engage the other contactor.
10) A network Stop command will stop the actuator if the selector switch is in Remote or Local
mode. The actuator local Stop pushbutton will stop the actuator if the selector switch is in
Remote or Local mode.
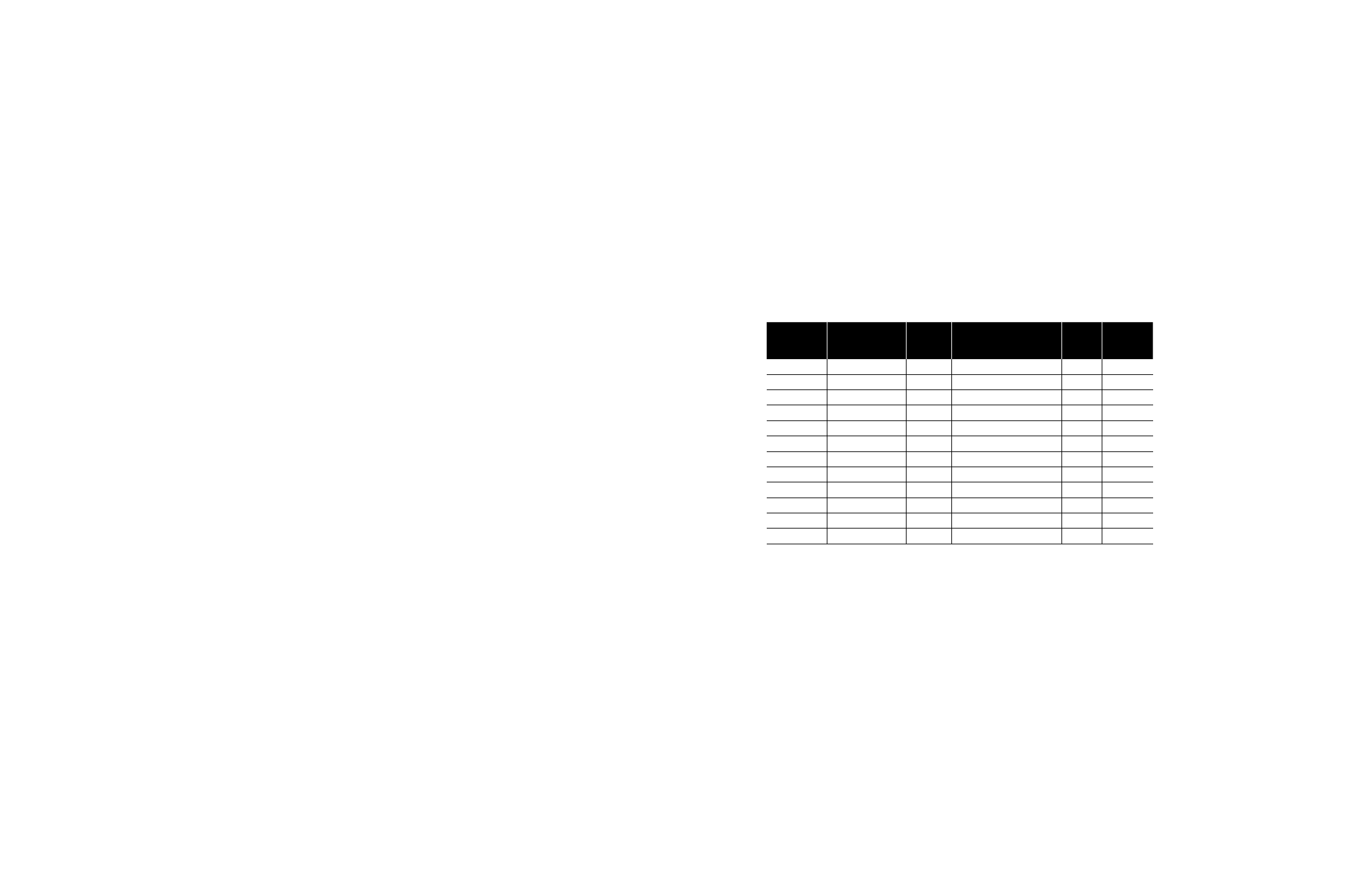
Table 6.1 – Sample Tag Table for Direct-to-Host applications
Tag Name
Description
Modbus
Slave
Address
Comments
Modbus
Register
Modbus
Command
Data
80-HS-4141A
Open actuator
1
Command to open the valve
40001
256 (Dec)
80-HS-4141B
Close actuator
1
Command to close the valve
40001
768 (Dec)
80-POS-4141
Position feedback
1
Valve position in % of Open
40008
n/a
80-STAT-4141
Status register
1
16 bits of status
40009
n/a
80-HS-4142A
Open actuator
2
Command to open the valve
40001
256 (Dec)
80-HS-4142B
Close actuator
2
Command to close the valve
40001
768 (Dec)
80-POS-4142
Position feedback
2
Valve position in % of Open
40008
n/a
80-STAT-4142
Status register
2
16 bits of status
40009
n/a
80-GO-5253A
Initiate “move-to”
3
Initiate “move-to”
40001
6656 (Dec)
80-GO-5253B
“move-to” value
3
% of Open value
40002
0-100 (Dec)
80-POS-5253
Position feedback
3
Valve position in % of Open
40008
n/a
80-STAT-5253
Status register
3
16 bits of status
40009
n/a