Applied Motion STR2 User Manual
Page 20
20
STR2 Hardware Manual
920-0059B
1/30/2014
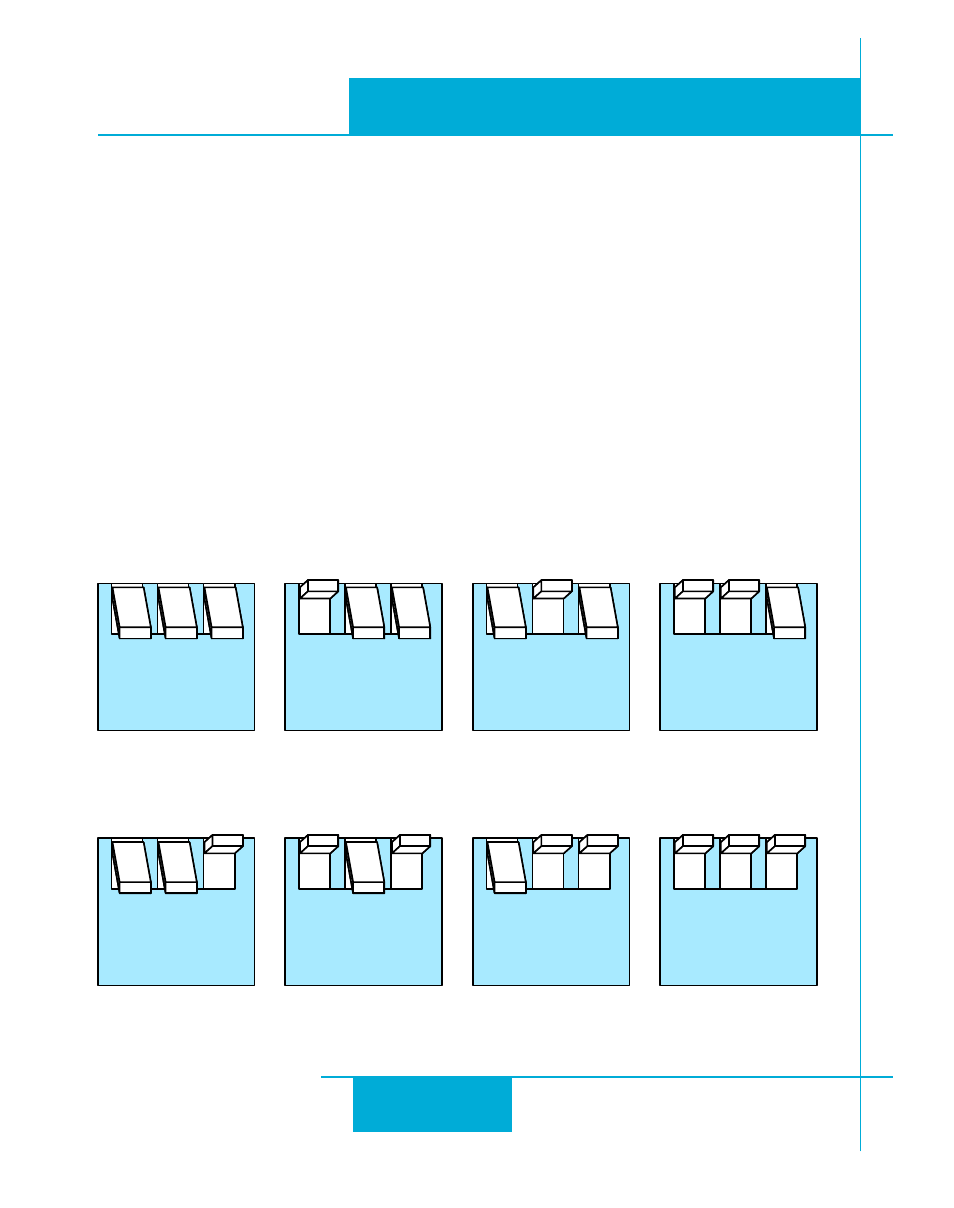
6 7 8
200
6 7 8
200
SMOOTH
6 7 8
400
6 7 8
400
SMOOTH
6 7 8
2000
6 7 8
5000
6 7 8
12800
6 7 8
20000
Please choose the one that best matches the capability of your system.
At lower step resolutions such as 200 steps/ rev (full step) and 400 steps/rev (half step), motors
run a little rough and produce more audible noise than when they are microstepped (2000
steps/rev and beyond). The STR drives include a feature called “microstep emulation”, also
called “step smoothing”, that can provide smooth motion from coarse command signals. By
selecting “200 smooth” or “400 smooth”, this feature is automatically employed to provide the
smoothest possible motion from a less than ideal signal source.
Because a command filter is used as part of the step smoothing process, there will be a slight
delay, or “lag” in the motion. If this delay is objectionable for your application, please choose
the non-filtered setting “200” or “400”. The chart on the next page shows an example of the
delay that can occur from using the step smoothing filter.