Identifier (address) commands, Read / write motor system times „k“ (6bh), Read / write specific parameter „x“ (78h) – Baumer N 153 User Manual
Page 21
N 153
www.baumer.com
21
4.3.9. Read / write motor system times „k“ (6Bh)
This command is utilized to read or write the individual motor system times within the range of 0,1 s to 99,9 s.
Tolerance: ±7% at minimum time; < 1‰ at maximum time, approx. 1% at 1 s.
The following parameter is available:
Loop:
Waiting time at turning point during loop operation
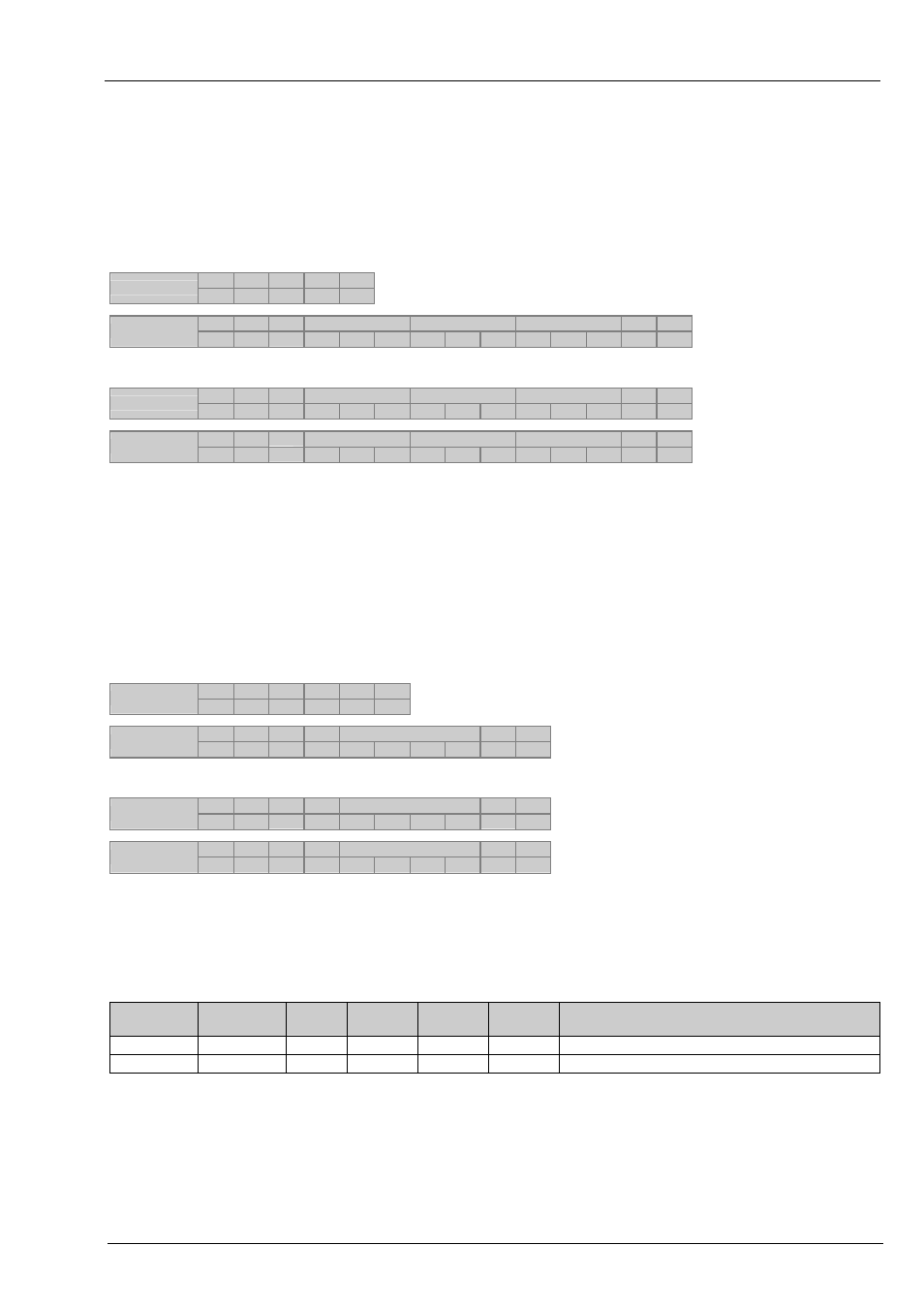
Example 1: Read parameter (loop = 1.0s)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 6Bh 04h 5Ah
SOH Adr Cmd
Loop=1.0 s
reserved
reserved
EOT CRC
Response
01h 20h 6Bh 30h 31h 30h 30h 30h 30h 30h 30h 30h
04h D9h
Example 2: Write parameter (loop = 2.0s)
SOH Adr Cmd
Loop=2. s
reserved
reserved
EOT CRC
Transmission
01h 20h 6Bh 30h 32h 30h 30h 30h 30h 30h 30h 30h
04h DAh
SOH Adr Cmd
Loop=2.0 s
reserved
reserved
EOT CRC
Response
01h 20h 6Bh 30h 32h 30h 30h 30h 30h 30h 30h 30h
04h DAh
4.3.10. Read / write specific parameter „x“ (78h)
The specific parameter „x“ comprises several sub-parameters enabling alteration of originally permanent pa-
rameters to adapt them to new circumstances. Presently the following sub-parameter is available:
D (44h) = delaytime for minimized timeout reply of serial interface
Sub-Parameter: Delaytime „D“ (44h)
This parameter defines the minimum delay time (break) between the last bit received and the first bit of the re-
sponse transmitted. Delay time is programmable in steps of 0,1 ms from 00.0 ... 60.0 ms, default is 1.0 ms.
Example 1: Read actual delaytime
SOH Adr Cmd Sub EOT CRC
Transmission
01h 20h 78h 44h 04h 7Ch
SOH Adr Cmd Sub
Delaytime = 4.5
EOT CRC
Response
01h 20h 78h 44h 30h 30h 34h 35h
04h BBh
Example 2: Write new delaytime
SOH Adr Cmd Sub
Delaytime = 15.0
EOT CRC
Transmission
01h 20h 78h 44h 30h 31h 35h 30h
04h BDh
SOH Adr Cmd Sub
Delaytime = 15.0
EOT CRC
Response
01h 20h 78h 44h 30h 31h 35h 30h
04h BDh
Please not that the true delaytime might be prolonged. It depends on the required processing time as well as on
internal software cycles. Tolerance is approx. 8 ms.
4.4. Identifier (address) commands
Command
code
Data amount
in bytes
read
write
Broad-
cast
Saved in
EEPROM
Significance
A (41h)
2
X
X
X
X
Assign or indicate device identifier
B (42h)
2
-
-
-
-
SPA feedback in addressing mode