M-gage, S18m, Vehicle detection sensor – Banner M-GAGE S18M Series Vehicle Detection Series User Manual
Page 2: Overview, Warning
M-GAGE
™
S18M —
Vehicle Detection Sensor
2
P/N 114430 rev. C
Banner Engineering Corp.
•
Minneapolis, MN U.S.A.
www.bannerengineering.com • Tel: 763.544.3164
Banner Engineering Corp.
•
Minneapolis, MN U.S.A.
www.bannerengineering.com • Tel: 763.544.3164
Banner Engineering Corp.
•
Minneapolis, MN U.S.A.
www.bannerengineering.com • Tel: 763.544.3164
Overview
The M-GAGE S18M sensor implements a passive sensing technology to detect large
ferrous objects. The sensor measures the change in the Earth’s natural magnetic field
(the ambient magnetic field) caused by the introduction of a ferromagnetic object.
This easy-to-use sensor is extremely robust and is unaffected by dirt and moisture,
making it ideal for demanding outdoor environments. Simple programming
procedures provide flexibility for a variety of applications (see page 5).
Theory of Operation
The sensor uses three mutually perpendicular magnetoresistive transducers. Each
transducer detects magnetic field changes along one axis. By incorporating three
sensing elements, maximum sensor sensitivity is achieved.
A ferrous object will alter the local (ambient) magnetic field surrounding the object, as
shown in Figure 1. The magnitude of this magnetic field change is dependent both on
the object (its size, shape, orientation, and composition) and on the ambient magnetic
field (its strength and orientation).
During a simple programming procedure, the S18M sensor measures the ambient
magnetic field. When a large ferrous object (for example, a truck, automobile, or
rail car) alters that magnetic field, the sensor detects the magnetic field changes
(anomalies). When the degree of magnetic field change reaches the sensor’s
threshold, the sensor’s discrete outputs switch.
Sensor Field of View and Range
The sensor range depends on three variables:
1. The local magnetic environment (including nearby ferrous material)
2. The magnetic properties of the object to be sensed
3. Sensor settings
The S18M can detect changes in the ambient magnetic field in all directions. As with
other sensors, the range will depend on the target. The strong disturbance of a large
ferrous object decreases as distance from the sensor increases, and the magnitude
and shape of the disturbance is dependent on the object’s shape and content.
The sensor can be programmed to react to magnetic field disturbances of greater or
lesser intensity, using two adjustments: background condition and sensitivity level.
Once background condition and sensitivity level are set, and both settings are stored
in non-volatile memory, the sensor is ready to detect the target object.
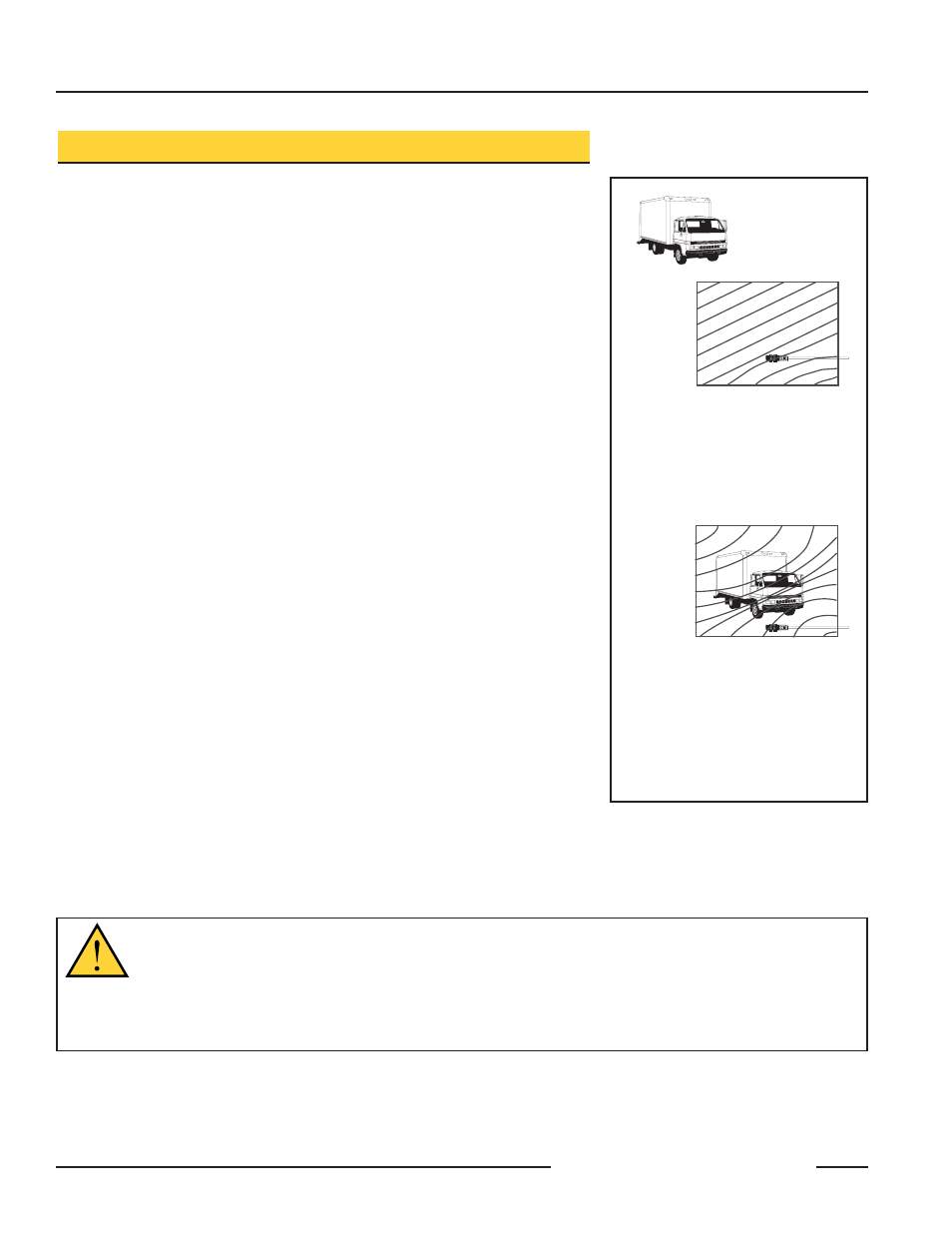
Figure 1. Magnetic detection overview
A. Baseline magnetic field, with slight
disturbances caused by permanent
ferrous-metal objects within or near
the sensor, then . . .
B. After a large steel target object is
introduced.
The sensor detects the differential
(magnetic strength and orientation)
between fields A and B. If the
differential is greater than the
sensitivity threshold, the sensor’s
outputs conduct.
WARNING . . .
Appropriate Use
The mechanical opening, braking, and reversing systems of the door will not respond in sufficient time to prevent moving
trucks, cars, or material handling vehicles, even those traveling at low speeds, from coming in contact with the door. In
addition, the detection zone of the product may fluctuate due to changes in the local magnetic environment. All vehicles should
approach doors at speeds that allow the operator to ensure the door is operating properly and in an open position. Failure to follow these
procedures may result in serious injury or death.