A3 connections, Connections, Battery – DJI Ace One User Manual
Page 7: Can bus – interface for ace one module
©2012 DJI Innovations. All Rights Reserved.
7 |
A3
Connections
X3
X2
X1
U
P
G
R
T
E
A
F4
F3
F2
F1
S4
S3
S2
S1
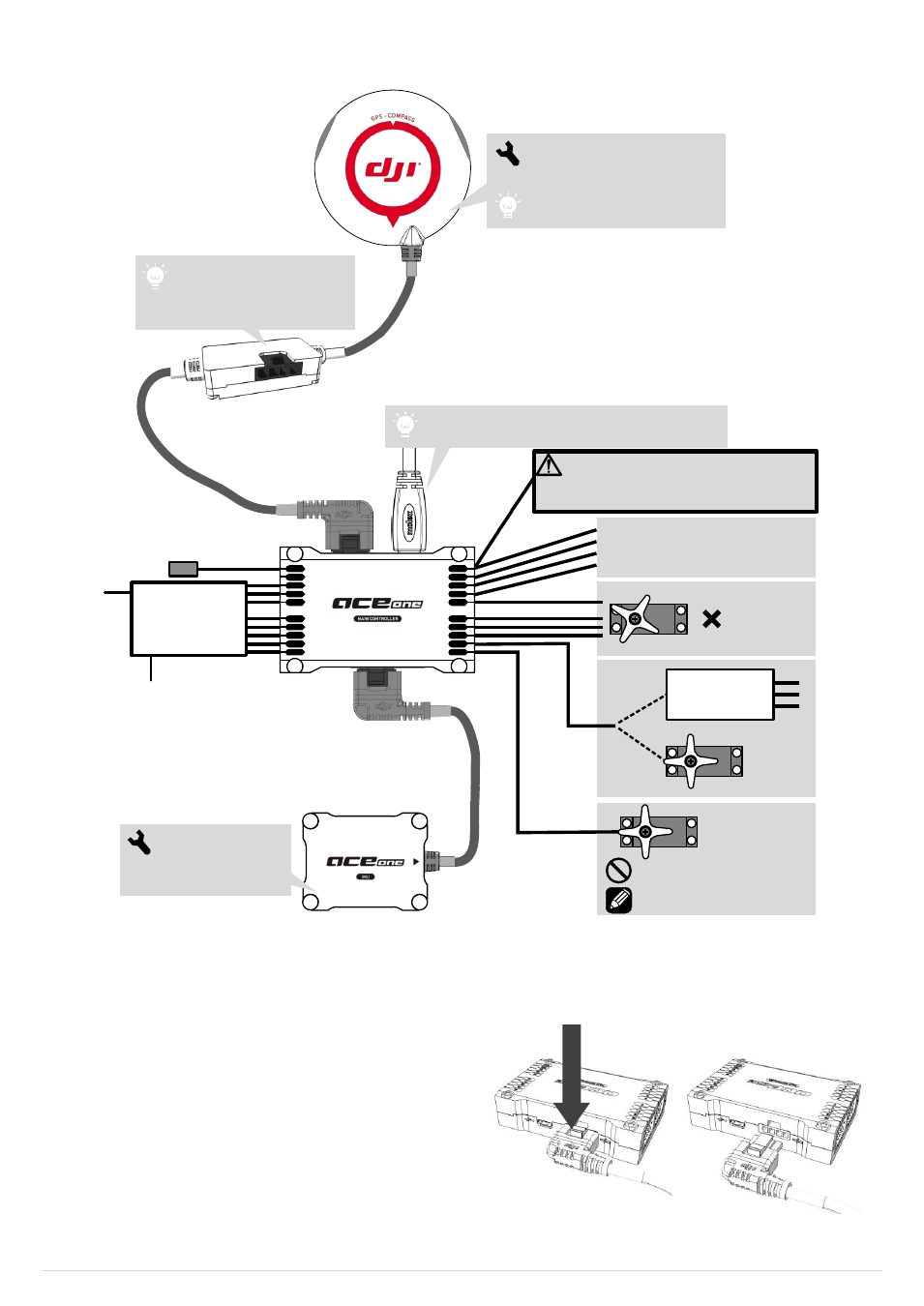
Brushless
Motor
Controller (ESC)
Electric
Motor
Gas/Nitro
Engine
Rudder Servo
Throttle Servo
Engine Speed Sensor
Battery
MUST supply 4.8 - 8.4 volts.
Could be connect to any of the spare I/O port.
Swashplate Servo
3
or
4
LEDs are status indicators.
GPS/COMPASS:
Mount to the
Tail boom, 20 cm from servos,
30 cm from motor, 10 cm from tail rotor.
Micro-USB:
PC connection for configuration and
firmware upgrades.
Internal vibration
isolation design,
enable a more convenient
IMU
mounting.
In-line CAN-Bus Port:
This CAN-Bus port can be used
for the IMU connection or for future
hardware upgrades.
Main Controller
R/C Receiver
THR
RUD
DO NOT connect the rudder
servo until the servo type has
been selected in Ace Assistant.
F channel is available for control of
gimbal servo, camera shutter, etc.
Please use Assistant Software or DJI
Ground Station to setup.
CAN Bus
– Interface for Ace One Module
The Ace One MC uses CAN-Bus to power and communicate with
other Ace One modules. Three connection ports are provided: two
on the MC and one in-line connection on the GPS/Compass wire.
Ace One identifies the connected devices automatically without
configuration.
GPS module can be connected to either port of MC.
IMU can be connected to the MC or to the in-line port on the
GPS wire. Connect the GPS/Compass and IMU to the MC.
Press & Pull out