Return-to-launch mode, Autonomous mode, And missions – 3D Robotics IRIS User Manual
Page 21: Rtl), Auto)
19
Return-to-Launch Mode
(RTL)
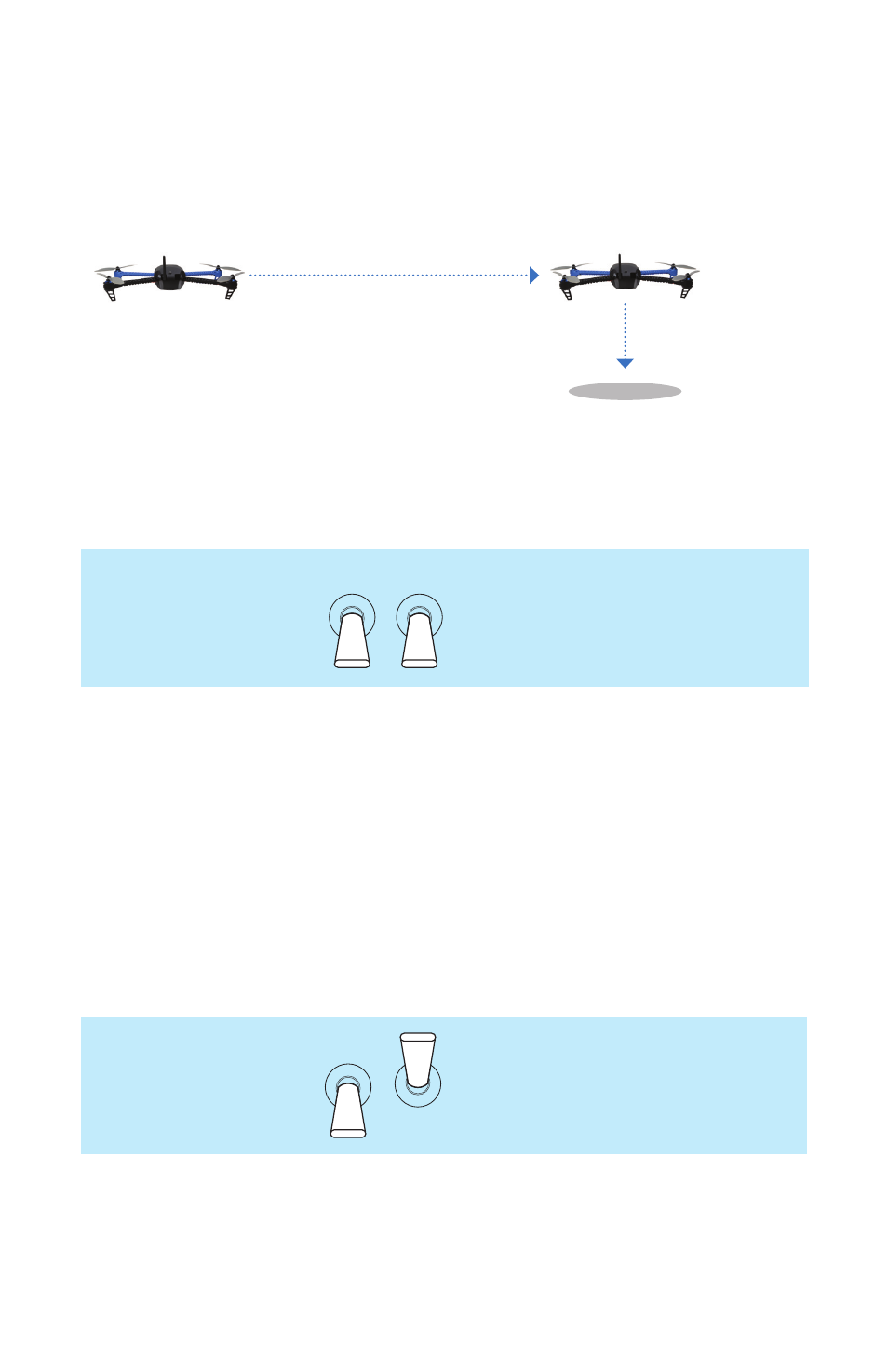
Return to launch (RTL)
down-down
GPS required before takeoff
To recall IRIS to the launch point during flight, execute a return-to-launch (RTL)
command. RTL automatically returns IRIS to the launch point, and can be used
any time you would like to land quickly. RTL requires GPS lock prior to takeoff.
When commanded to RTL, IRIS will:
1 Achieve minimum altitude of 15 m (50 ft)
or maintain current altitude if above 15 m.
2 Move to launch point and loiter for 5 seconds.
3 Land at launch point.
launch point
15 meters
1
2
3
hover 5 seconds
»
First, achieve altitude of 15 m
»
Next, return to launch point
»
Then, land
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch
To RTL, set both switches to the down position (down-down). Ensure the
launch point is clear to allow IRIS to land safely.
Autonomous Mode
(AUTO)
and Missions
Fly a fully autonomous mission using a computer or Android device as a
ground station. When switched into autonomous (AUTO) mode, IRIS will
automatically perform the mission and report data back to the ground station.
For instructions on setting up your ground station, planning a mission, and
saving it t.
Autonomous mode requires GPS lock (flashing green LED) prior to takeoff.
Follow these steps to run a fully autonomous mission with automatic takeoff
and landing. If your mission is not planned with an automatic takeoff and
landing, fly to the location of your first waypoint before switching to
autonomous mode.
Autonomous (AUTO)
down-up
GPS required before takeoff
»
Fly a planned mission
»
Fully autonomous flight
Stabalize
Altitude Hold
Loiter
Full Autonomy
Return to Launch