Β < 0 (β < 0, α < φ), Β > 0, α > φ, Γ = arccos(h/r) – ElmoMC Multi-Axis Motion Controller-Maestro Motion Control User Manual
Page 46: Λ = θ + γ = θ + arccos(h/r), D = ρ(o, H/cos(λ), R/h = (d – r – r)/d
Motion Library Tutorial
Switch Radius Calculation
MAN-MLT (Ver 2.0)
2-25
1. Circle init radius intersects with the line
L
continued in its positive direction
(Figure 2-23);
2. Line
L
is
parallel to the init radius (Figure 2-25);
3. Line
L
continued in the reverse direction intersects init radius (Figure 2-26) (by
the init radius there a line segment that connects the circle arc center with the
circle arc init point).
2.2.3.1 Line L and init radius continued in their positive
intersecting directions
The init circle radius continuing in its positive direction intersects with the line
L
continued
in its positive direction (Figure 2-23). It takes place if the circle arc init angle with the axis
X
positive direction
α
is less than the line
L
angle with the axis
X
positive direction
φ
and the
circle arc sweep angle
β < 0 (β < 0, α < φ)
or in case:
β > 0, α > φ.
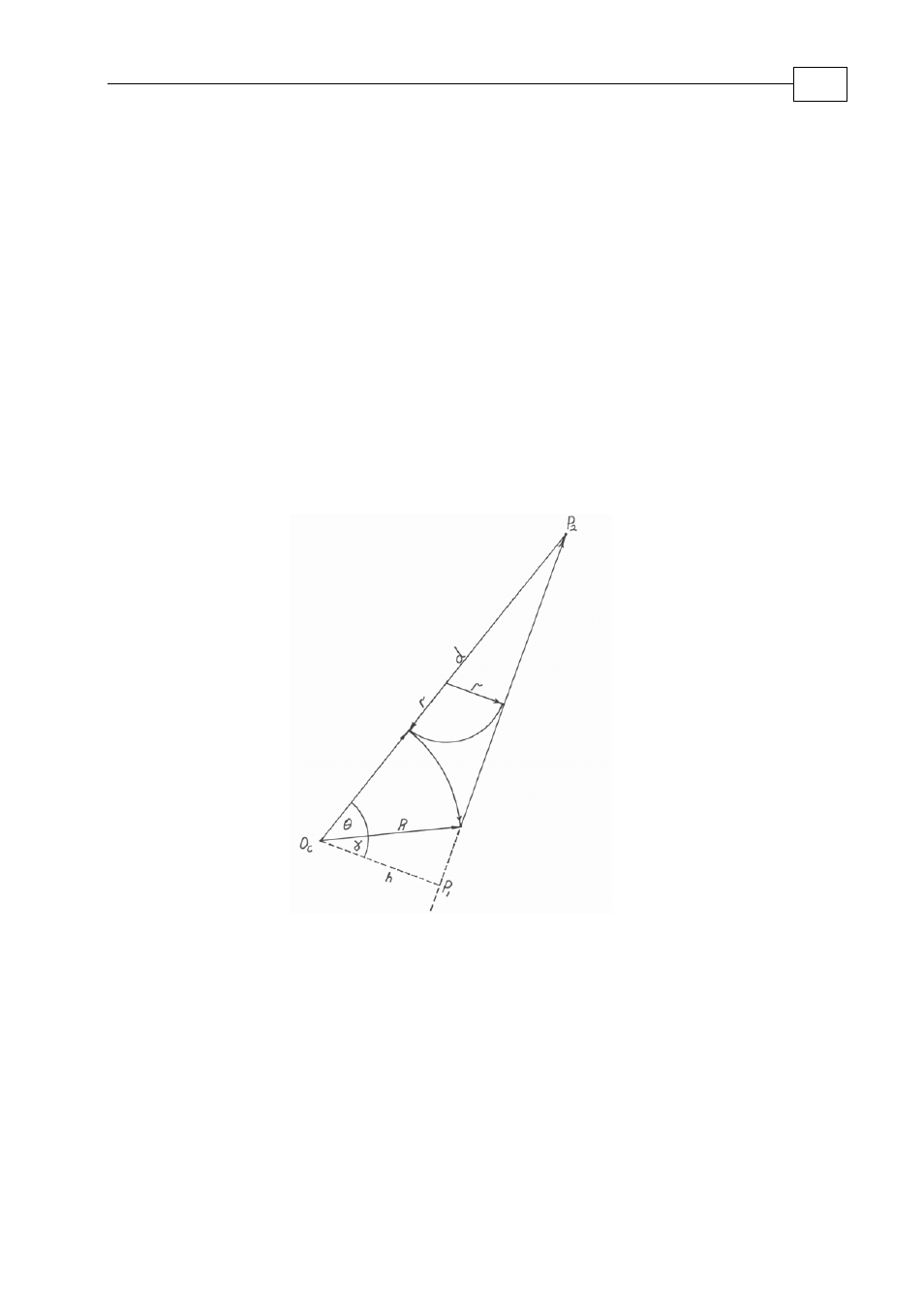
Figure
2-23
Drop a perpendicular from the circle center
O
c
on the line
L.
Its length
h
can be
calculated by (2.2.1.1-4). Now calculate the angle
γ = arccos(h/R),
where
R –
circle
arc radius. The circle arc sweep angle
θ
so
λ = θ + γ = θ + arccos(h/R).
Now calculate the distance
d = ρ(O
c
, P
2
) = h/cos(λ)
(2.2.3.1-1)
To define the switch radius
r,
use a proportion
r/h = (d – R – r)/d
(2.2.3.1-2)