R = ρ, Vse), Vsr < ρ – ElmoMC Multi-Axis Motion Controller-Maestro Motion Control User Manual
Page 32
Motion Library Tutorial
Switch Radius Calculation
MAN-MLT (Ver 2.0)
2-11
r = ρ
1
ρ
2
/(ρ
1
+ ρ
2
)
(2.2.1.1-10)
As in the previous case, the user defined parameter vsr must obey
(vse)
2
/vac
< vsr < ρ
1
ρ
2
/(ρ
1
+ ρ
2
)
(2.2.1.1-11)
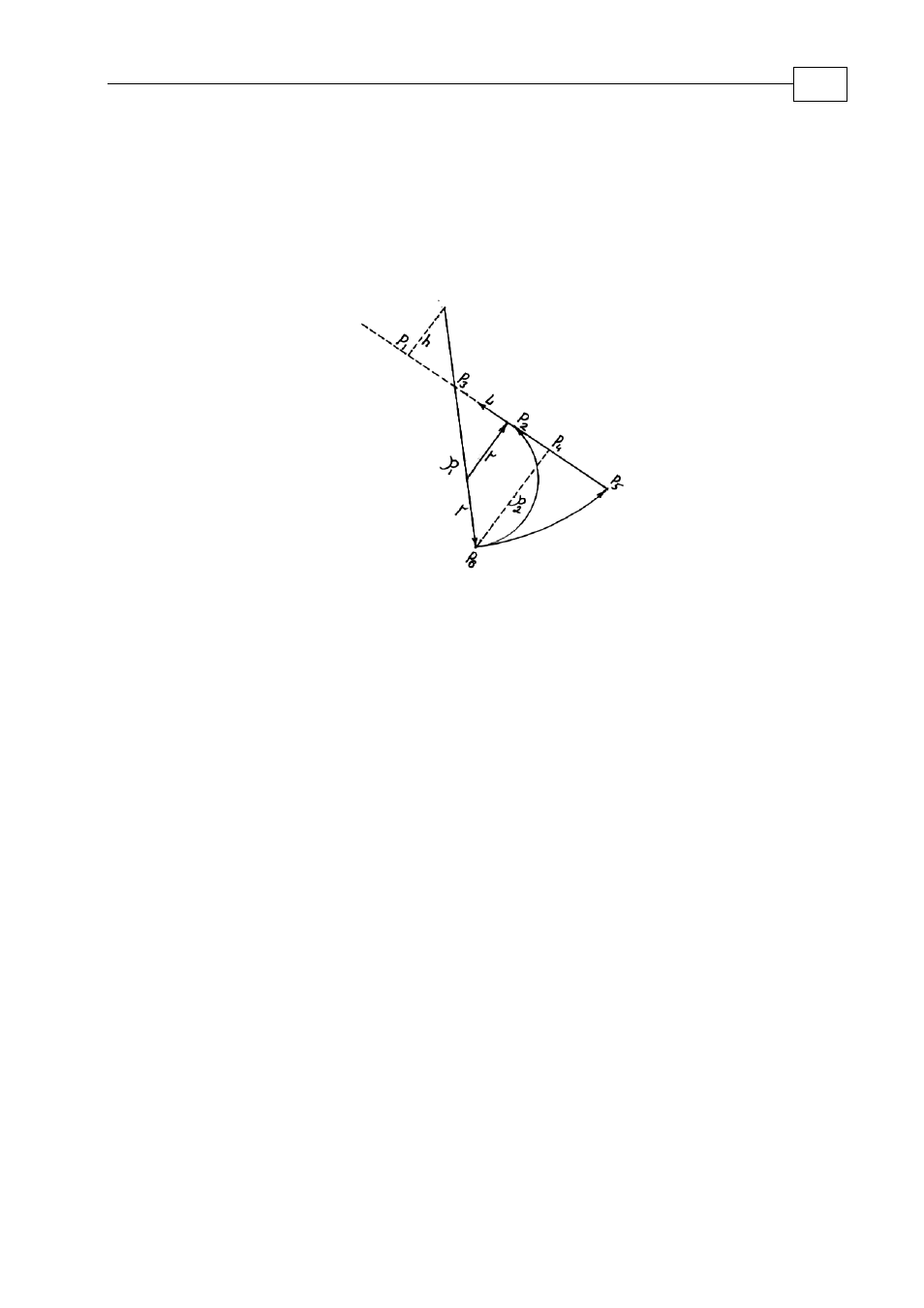
Figure
2-5
Example 2-6
(
Motion Mathematic Lib Samples
\Circle to Line\ Section 2_2_1_1\
CircleLine_Ex_2_6 – www.elmomc.com)
The circle arc in Figure 2-6 is defined by the radius R = 100000, init angle α = -90
o
,
sweep angle β = 30
o
and the init position X
from
= 0, Y
from
= -100000.
Line L end point: X
to
= -40000, Y
to
= 0;
The circle arc end point P
5
coordinates can be calculated as X
5
= R*cos(π/3) = 50000,
Y
5
= R*sin(-π/3) = -86602.54;
Line L is defined by two points P
1
(-40000, 0) and P
2
[Rcos(-60), Rsin(-60)] =
P
2
(50000, -86602.54). Its standard equation is Ax + By + C = 0,
where
A = – (Y
2
– Y
1
) = -(0 + 86602.54) = –86602.54, B = X
2
– X
1
= -40000 – 50000
= -90000, C = X
1
(Y
2
– Y
1
) – Y
1
(X
2
– X
1
) = 50000(0 + 86602) + 86602.54(-40000 -
50000) =–3464101600.0
where (X1, Y1) and (X2,Y2) – line end points.
Calculate ρ
2
by (3.1.1-4) as
ρ
2 =
|(-86602.54)0 + (-90000)(-100000) - 3464101600.0|/[(-86602.54)
2
+(-90000)
2
]
1/2
= 44322.6596
To define ρ
1,
take into account that line (O, P
6
) in Figure 2-6 coincides with the axis
Y so coordinates of its intersection point with the line
L
are (0, -C/B).