Triton SB-Interpreter User Manual
Page 16
Page 13
PROCESS NAVIGATION
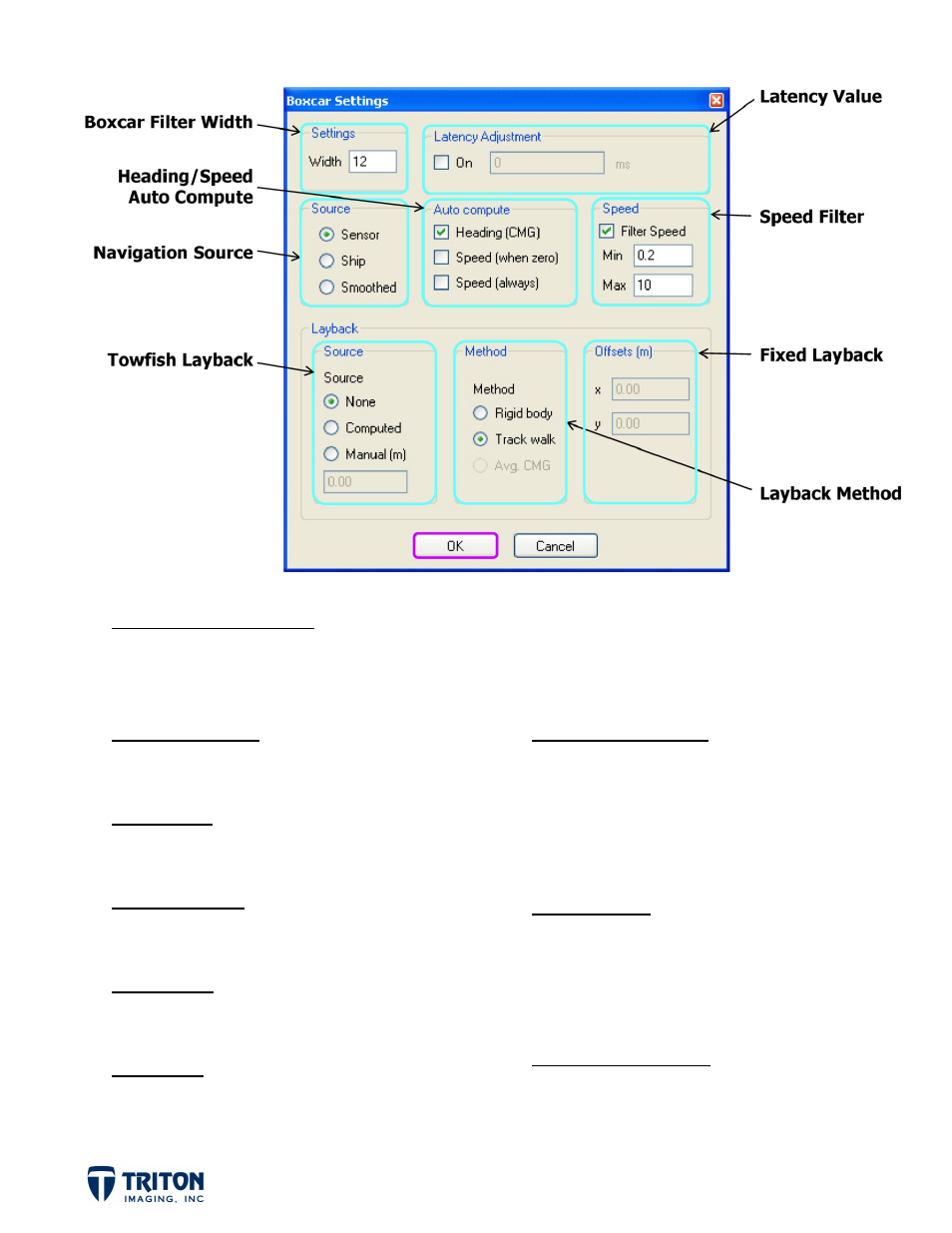
Boxcar Settings is a collection of common navigation processing steps for removing errors in navigation
data. A brief description of the processing parameters and their options is presented below.
Boxcar Filter Width
•
A larger number smoothes over a longer time
period
Latency Value
•
If known, latency values for the acquisition
system can be entered here
Navigation Source
•
‘Smoothed’ is for the previously smoothed
navigation stored in cache file
Auto Compute
•
Use this if heading or speed is not available
in original file
Speed Filter
•
Removes large jumps in navigation by
removing values outside known speed range
Towfish Layback Source
•
Use ‘None’ if hull mounted or if navigation is
from the sensor
•
‘Computed’ calculates layback from x-y values
entered in ‘Offsets’ field or from values stored
in XTF file
•
‘Manual’ is for a fixed cable out value
Layback Method
•
‘Rigid body’ will use the heading computed or
stored in the cache file
•
Track walk - project the entered layback value
back along the vessel track to compute the
position
Offsets (Fixed Layback)
•
Location to manually enter static layback value
or fixed offsets