Figure 4-2: lr oscillator circuit biasing diagram – PNI RM3000 Sensor Suites User Manual
Page 21
RM3000 & RM2000 Sensor Suite User Manual r08
Page 21 of 41
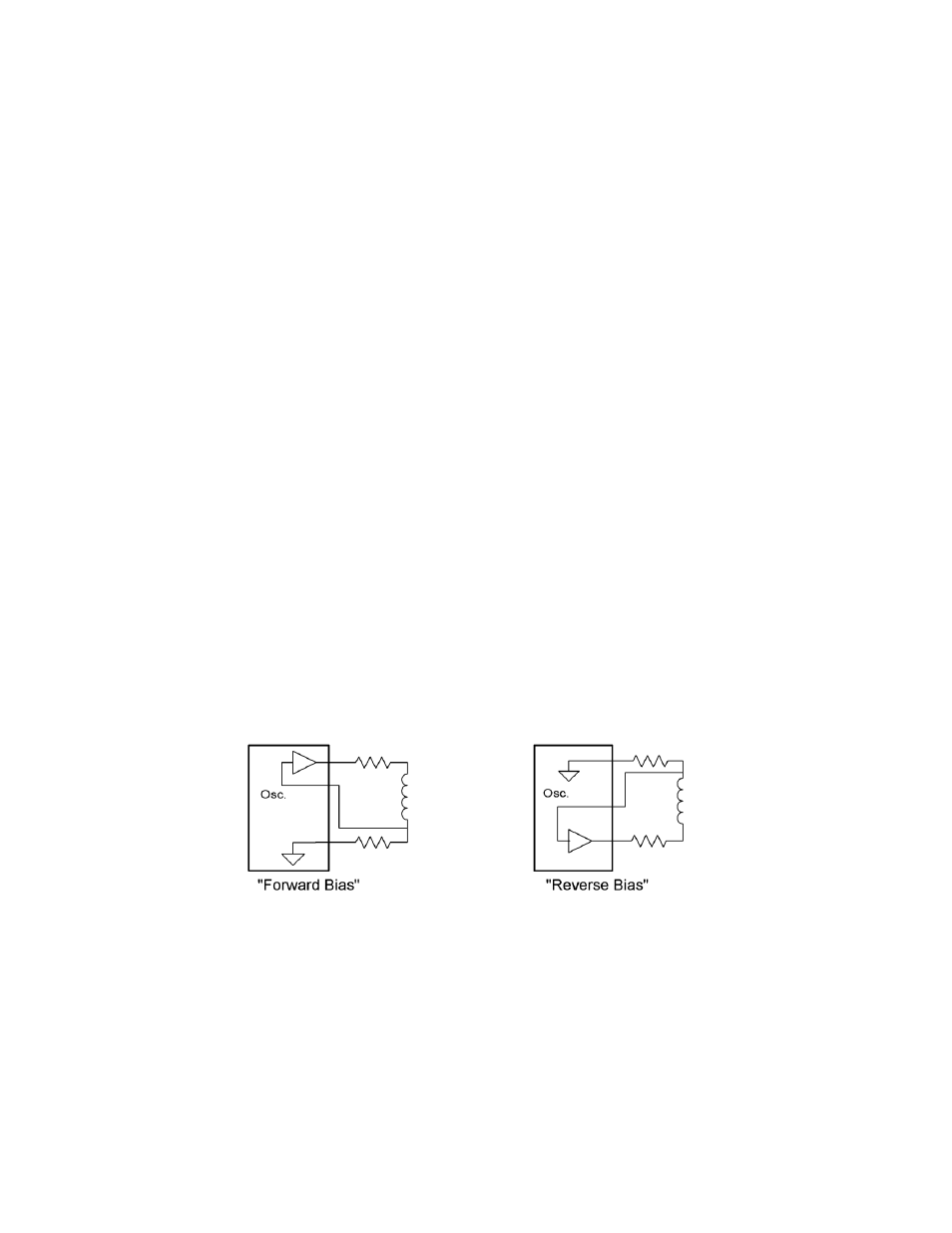
a comparator internal to the 3D MagIC. The sensor’s inductance varies with respect to the
magnetic field. As such, the frequency of oscillation of the circuit varies with the strength of
the total magnetic field parallel to the sensor. To make a measurement, one side of the
sensor is grounded while the other side is alternately driven with positive and negative
current through the oscillator. The circuit is driven for a user-specified number of circuit
oscillations (the cycle counts), and the time to complete the specified number of cycle counts
is measured using the 3D MagIC’s internal high-speed clock. The 3D MagIC next switches
the bias connection to the sensor and makes another measurement. The side that was
previously grounded is now charged and discharged while the other is now grounded. Since
the total magnetic field represents the sum of the external magnetic field and the circuit-
induced magnetic field, and since the circuit-induced magnetic field has the same magnitude
but opposite direction for the two bias polarities, the external magnetic field is proportional
to the difference in the time to complete the user-defined number of cycle counts (i.e. the
difference in the total measured magnetic field). The difference in the number of high-speed
clock oscillations between the forward and reverse bias directions is output from the 3D
MagIC, and this number is directly proportional to the strength of the local magnetic field in
the direction of the sensor. Note that only one sensor can be measured at a time and the
number of cycle counts is individually set for each sensor. Also, the greater the number of
cycle counts, the higher the resolution of the measurement (to the noise limit) and the longer
the sample time. Figure 4-2, below, provides a detail of the biasing circuit. For additional
information on PNI’s magneto-inductive sensor technology, please refer to the “Magneto-
Inductive Technology Overview” white paper found on PNI’s website.
Figure 4-2: LR Oscillator Circuit Biasing Diagram
Since the Geomagnetic Sensor Suite works in the frequency domain, resolution is cleanly
established by the number of cycle counts. Also, the output from the 3D MagIC is inherently
digital and can be fed directly into a microprocessor, which eliminates the need for signal
conditioning or an analog/digital interface between the sensor and host processor.