Control pl, Control pid, Control proporcional más integral (pi) – Watlow Series F4 User Manual
Page 67
Wa t l o w S e r i e F 4
C a r a c t e r í s t i c a s
■
8 . 5
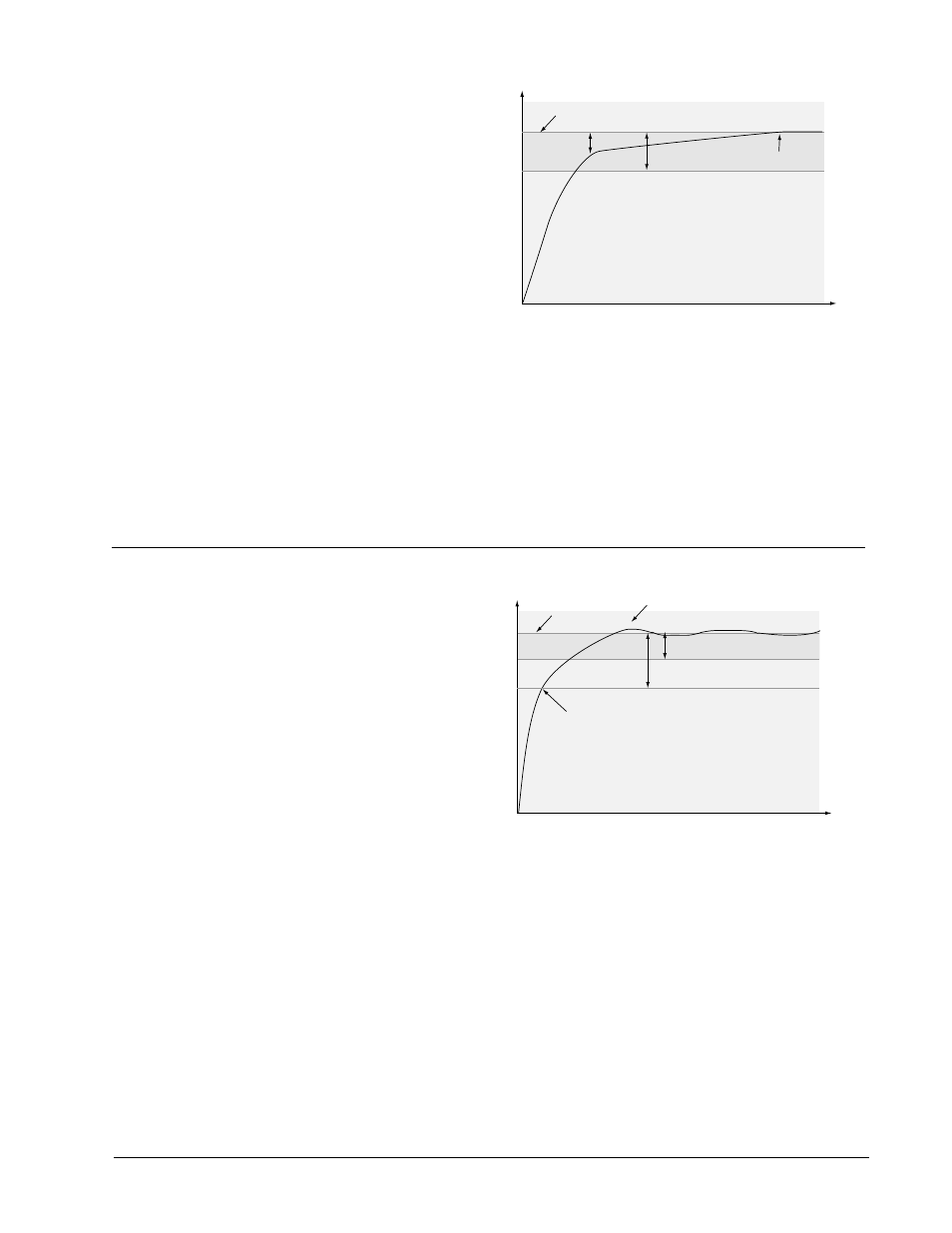
Control proporcional más integral (PI)
La caída causada por el control proporcional
(restablecimiento) puede ser corregida agregando al
sistema un control integral. Cuando el sistema se ha
estabilizado, se sintoniza el valor integral a fin de
acercar la temperatura o el valor del proceso al punto
establecido. La acción integral determina la velocidad
de la corrección; sin embargo, esta acción podría
aumentar la sobretemperatura que se produce en el
arranque del equipo o cuando se cambia el punto
establecido. Un exceso de integral producirá
inestabilidad en el sistema. La acción integral se
elimina cuando el valor del proceso está fuera de la
banda proporcional.
La acción integral se mide en minutos por repetición
(en unidades SI). Un valor integral bajo produce un
acción integral rápida.
El restablecimiento se mide en unidades de
repeticiones por minuto (en unidades inglesas). Un
valor de restablecimiento alto produce un acción
integral rápida.
Ubicación: Página Operaciones > Editar PID >
Conjunto PID canal x (1 ó 2) > Conjunto PID x (1
a 5) ó (6 a 10).
Figura 8.5a — Control proporcional más integral.
Tiempo
Temperatura
Punto establecido
Banda proporcional
Caída
Caída corregida
Control proporcional más integral más
derivativa (PID)
El control derivativo se utiliza para minimizar el
sobretemperatura en un sistema controlado por acción
PI. La derivativa (compensación de excedente) ajusta la
salida de acuerdo con la velocidad de cambio de la
temperatura o valor del proceso. Un exceso de
derivativa producirá lentitud en el sistema.
Ubicación: Página Operaciones > Editar PID >
Conjunto PID canal x (1 ó 2) > Conjunto PID x (1
a 5) ó (6 a 10).
Figura 8.5b — Control PID.
Tiempo
Temperatura
Punto establecido
Sobretemperatura reducida
Banda proporcional
Banda proporcional x 2
Calentamiento lento