Yaw/g sensor can bus, Data logging, Pc connection – MoTeC MDC2 User Manual
Page 8
MoTeC MDC2
6
Functionality
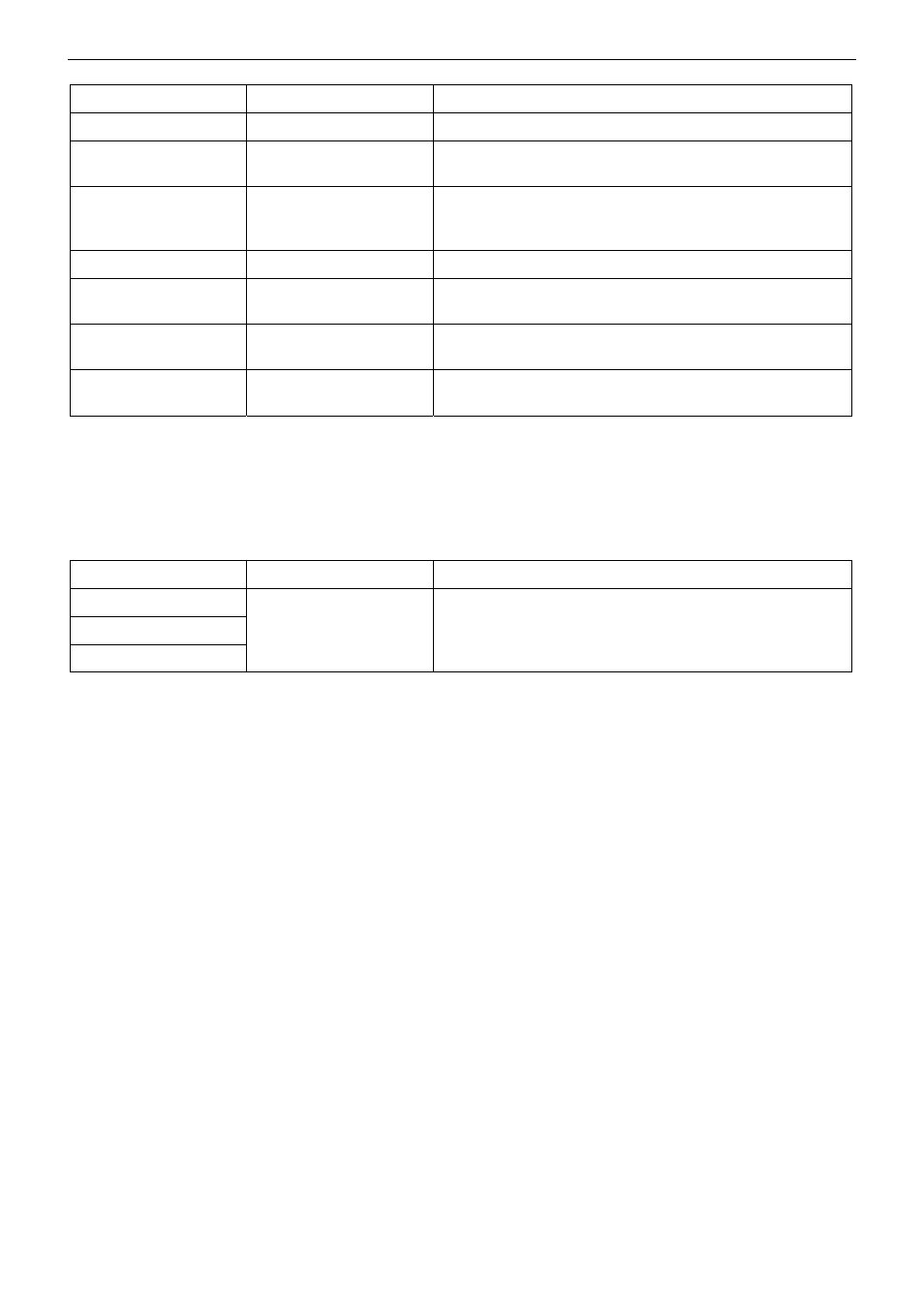
Transmitted Data
Target
Usage
Tacho position
Dashboard
Tacho based on M800 ECU RPM
Temperature Display
Dashboard
Temperature display based on M800 ECU engine
temperature
Thermo Fan Speed
Body Computer
Fan control (high or low speed) based on M800 ECU
requested thermo fan speed and M800 ECU internal
temperature
Diff Control Mode
Dashboard
MDC2 mode display (TARMAC etc.)
MDC2 readings &
status (50Hz)
MoTeC Dash Logger or
M800 ECU
MDC2 data for logging or use in engine control strategies
MDC2 readings &
status (25Hz)
MoTeC Dash Logger or
M800 ECU
MDC2 diagnostic data for logging
MDC2 readings &
status
PC (via MoTeC UTC)
Monitor channels function in MDC2 Manager
Yaw/G Sensor CAN bus
The MDC2 communicates at 500kbit/sec with a combined yaw/G sensor on a secondary vehicle CAN bus. The
MDC2 and yaw/G sensor are the only devices on this bus.
Received Data
Source
Usage
Lateral G
Yaw/G sensor
Yaw/G sensor
Yaw/G sensor
Retransmitted for logging or engine control strategies
Longitudinal G
Yaw Rate
Data Logging
The MDC2 transmits CAN messages at 50Hz containing information about all input and output functions, such as
speed readings, diff currents etc.
The MDC2 transmits CAN messages at 25Hz containing diagnostic information such as fault flags, firmware
versions etc.
The transmission of CAN messages from the MDC2 can be disabled. This feature may be used to prevent
reverse engineering of user control modes.
To configure a MoTeC logging device (ADL2, ADL3 etc) to receive MDC2 messages, use the ‘MDC2’ and ‘MDC2
Diagnostics’ communications templates included with the Dash Manager application.
PC Connection
The main CAN bus is used for communication with a PC for configuration and upgrading firmware using the
MoTeC UTC (USB To CAN) adaptor or the MoTeC CAN cable.
An adaptor cable is provided with the MDC2 to provide access to the CAN bus. This cable also provides the
power required if the MoTeC CAN cable is used to interface with a PC.
See Appendix C – CAN Wiring Practices for recommended CAN wiring practices