Appendix e – can messages, 50hz messages – MoTeC MDC2 User Manual
Page 19
MoTeC MDC2
17
Appendices
Appendix E – CAN Messages
The MDC2 communicates on the main CAN bus running at 500kbit/s.
MDC2 operational data messages are each transmitted at 50Hz.
MDC2 diagnostic messages are each transmitted at 25Hz.
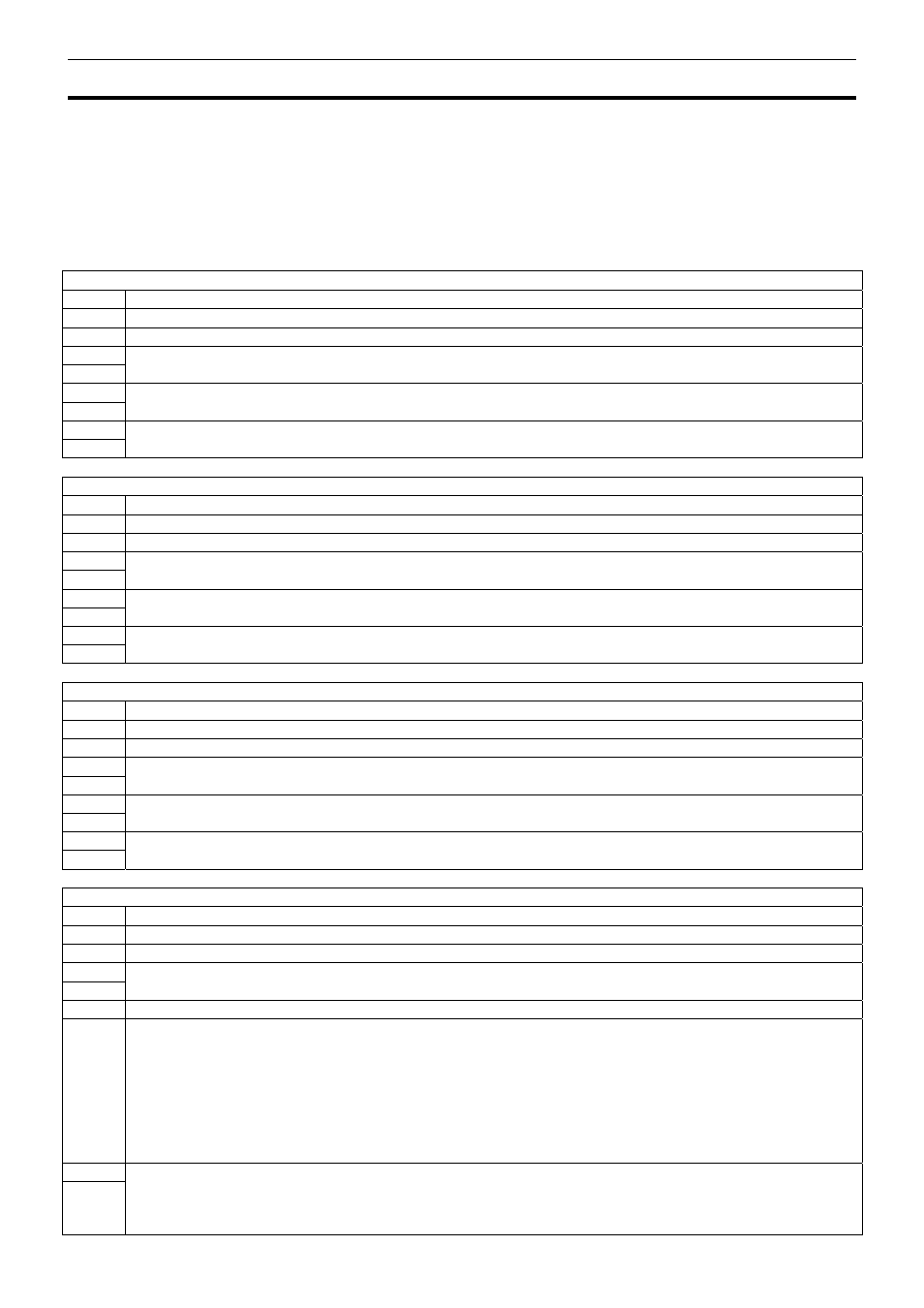
50Hz Messages
CAN ID 0x1F4
Byte Data
0
Compound Id = 0
1
Diff Current Average (0.01A resolution)
2
Vehicle Speed (0.1 km/h resolution)
3
4
Front Wheels Speed (0.1 km/h resolution)
5
6
Rear Wheels Speed (0.1 km/h resolution)
7
CAN ID 0x1F4
Byte Data
0
Compound Id = 1
1
Diff Current Minimum (0.01A resolution)
2
Yaw rate (0.1 deg/sec resolution)
3
4
Lateral G (0.001G resolution)
5
6
Longitudinal G (0.001G resolution)
7
CAN ID 0x1F4
Byte Data
0
Compound Id = 2
1
Diff Current Maximum (0.01A resolution)
2
Hydraulic Pressure (1kPa resolution)
3
4
Percentage Diff Lock (0.1% resolution)
5
6
Steering Angle (1deg Resolution)
0deg = centre, +deg = clockwise, -deg = anticlockwise
7
CAN ID 0x1F4
Byte Data
0
Compound Id = 3
1
Diff+ Voltage (0.1V resolution)
2
Fault Flags (See Appendix A – Fault Codes)
3
4
Diagnostic Flags (See Appendix A – Fault Codes)
5
Speed sensor noise fault flags:
Front Left
= 0x01 (bit 0)
Front Right
= 0x02 (bit 1)
Rear Left
= 0x04 (bit 2)
Rear Right
= 0x08 (bit 3)
BrakeStatus Flags:
Handbrake On
= 0x20 (bit 5)
Brake Pedal On = 0x80 (bit 7)
6 MDC2
Mode
0 = Diff open
1 to 4 = MDC2 user modes
5 = Constant diff lock
7