Appendix a – Atec Agilent-N1921A User Manual
Page 9
9
Appendix A
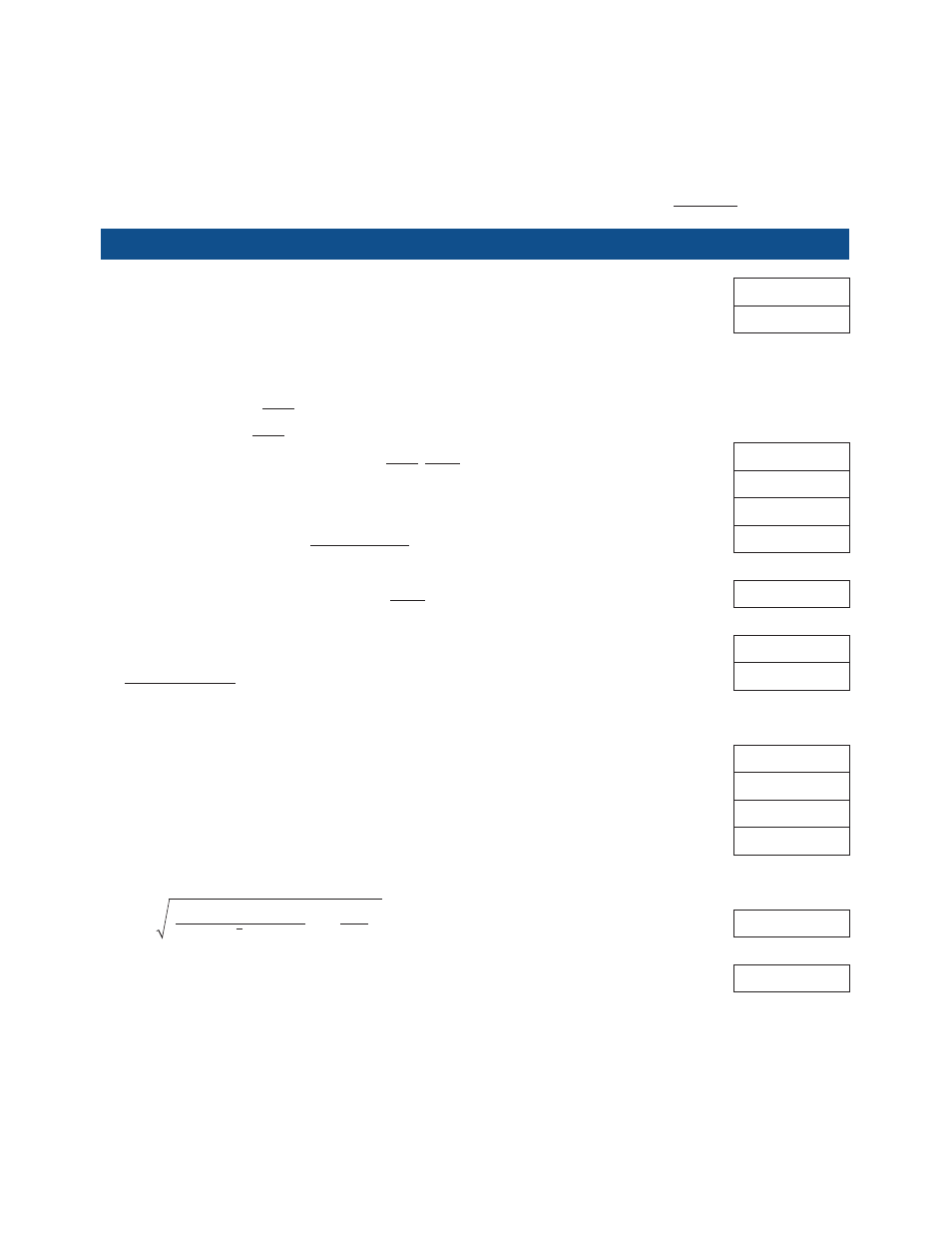
Uncertainty calculations for a power measurement (settled, average power)
[Specification values from this document are in bold italic, values calculated on this page are underlined.]
Process:
1. Power level: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
W
2. Frequency: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Calculate meter uncertainty:
Calculate noise contribution
• If in Free Run mode, Noise = Measurement noise x free run multiplier
• If in Trigger mode, Noise = Noise-per-sample x noise per sample multiplier
Convert noise contribution to a relative term
1
= Noise/Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
Instrumentation linearity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
Drift . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
RSS of above three terms ≥ Meter uncertainty = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
4. Zero uncertainty
(Mode and frequency-dependent) = Zero set/Power = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
5. Sensor calibration uncertainty
(Sensor, frequency, power and temperature-dependent) = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
6. System contribution, coverage factor of 2 ≥ sys
rss
= . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
(RSS three terms from steps 3, 4 and 5)
7. Standard uncertainty of mismatch
Max SWR (frequency-dependent) = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
convert to reflection coefficient, | ρ
Sensor
| = (SWR–1)/(SWR+1) = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Max DUT SWR (frequency-dependent) = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
convert to reflection coefficient, | ρ
DUT
| = (SWR–1)/(SWR+1) = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8. Combined measurement uncertainty @ k=1
U
C
=
(
Max(ρ
DUT
) • Max(ρ
Sensor
)
)
2
+
(
sys
rss
)
2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
√2 2
%
Expanded uncertainty, k = 2, = U
C
• 2 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
%
1. The noise-to-power ratio is capped for powers > 100 μW, in these cases use: Noise/100 μW.