External limit switch configuration commands – Ocean Optics HL-2000-HP-232 User Manual
Page 19
A: ASCII Commands
000-10000-140-02-201307
11
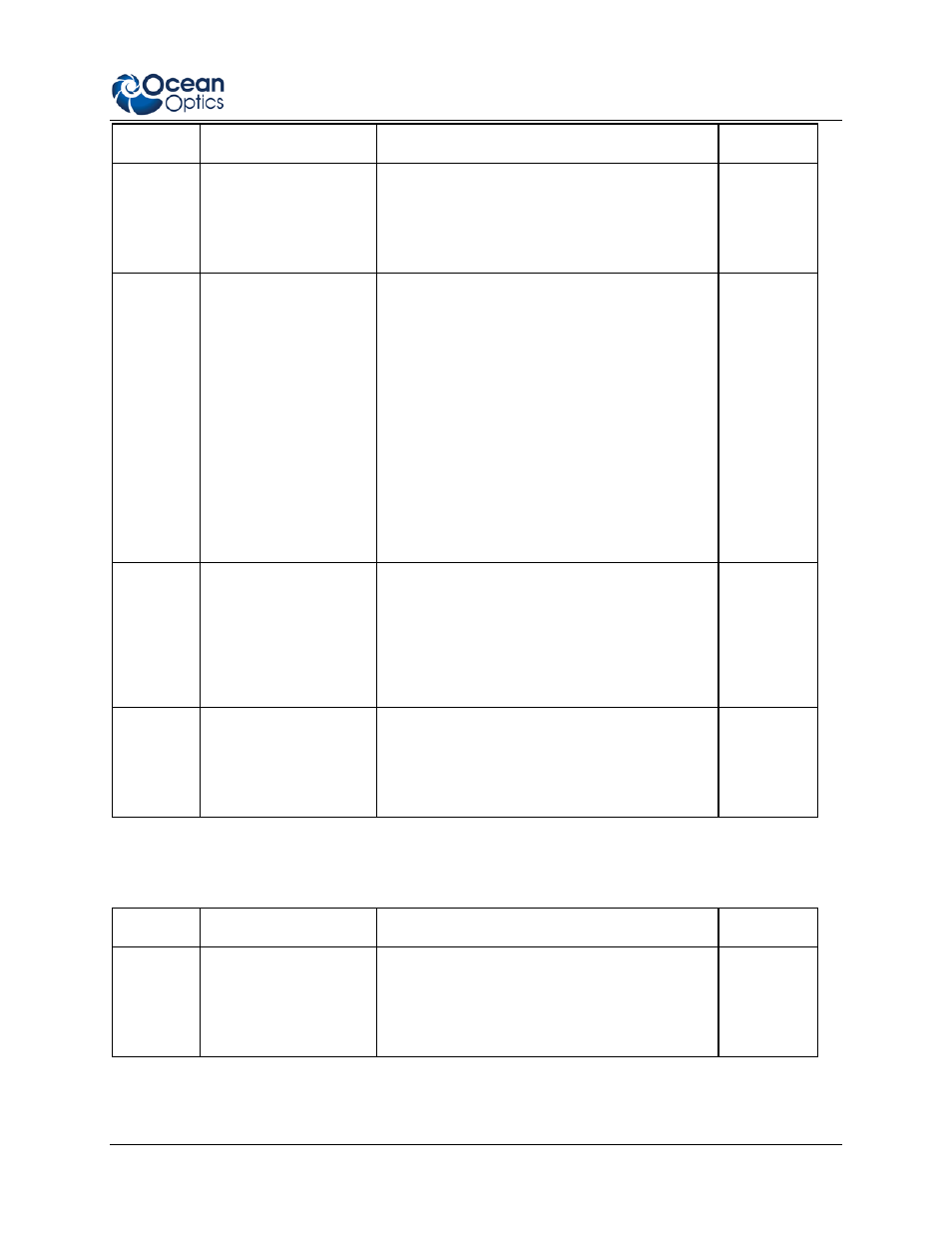
Command Function
Description
Example
DCE
Delayed Current Error
This command sets the delay between current
limit condition and setting the Fault-Status
(Fault-Pin and Fault-Bit for the GFS-
Command). The DCE argument is in
milliseconds.
DCE 200
SOR
Source For Velocity
This command defines the source for the
velocity of the motor.
SOR 0 defines that commanded velocity will
come from a serial command message using
RS232.
SOR 1 defines that the velocity value will be
an analog input voltage of +/-10 VDC at the
analog input. SOR 2 defines that the velocity
value will be a PWM signal at the analog input.
Note that the SP value dictates the Maximum
Velocity reached for the Maximum PWM signal
(SOR2) and the Maximum Velocity for 10 V at
the analog input (SOR1).
SOR 1
EEPSAV
Save To EEPROM
This command saves the current parameters
and configurations to EEPROM. The saved
parameters are recalled during power up so
that the motor is configured for use
immediately. After saving all configuration
parameters, a serial message "EEPROM
writing done" will be sent from the controller.
EEPSAV
NP
Notify Position
This command tells the motion controller to
send a "p" message when a particular position
is reached. In the example above, when 10,000
is reached a "p" message will be sent from the
controller.
NP 10000
External Limit Switch Configuration Commands
Command Function
Description
Example
HA
Arm the "HOME" input
This command is used to arm the Home Arming
mode. It is used with the external limit or
reference switch to define the home position
(the Analog input serves as this digital input as
well).
HA 1