Ascii commands, Motion-related commands, Appendix a – Ocean Optics HL-2000-HP-232 User Manual
Page 17
000-10000-140-02-201307
9
Appendix A
ASCII Commands
In serial communications mode, the motion controller is controlled via a series of ASCII instructions
issued by a host computer.
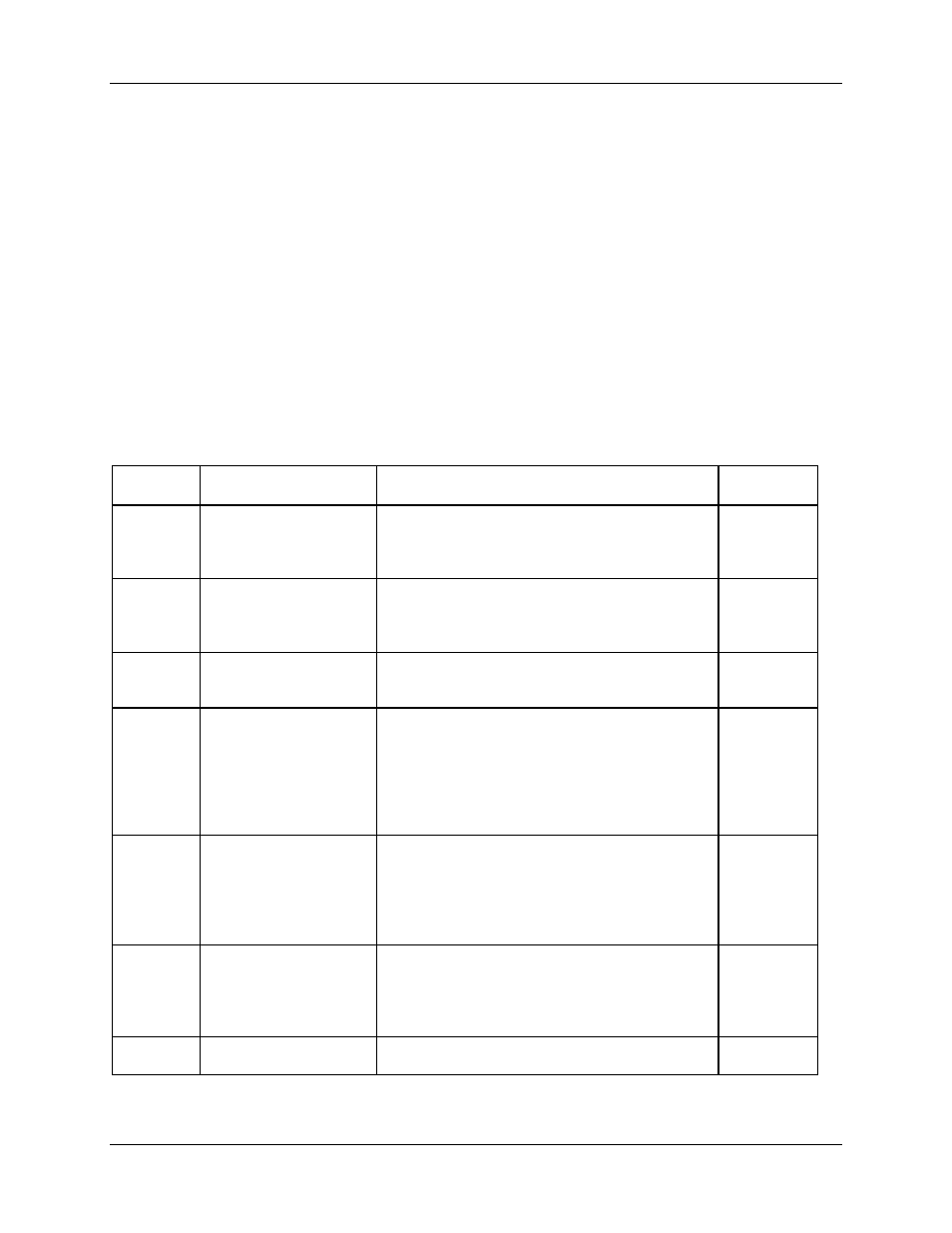
Motion-Related Commands
Command Function
Description
Example
M
Initiate Motion
Receipt of the "M" Move command initiates
motion using the values presently loaded to
determine the profile characteristics.
M
LA
Load Absolute Position Allows programming of the desired target
position relative to the present zero or "home"
position.
LA 10000
LR
Load Relative Position
Allows programming of the desired target
position relative to the present position.
LR 10000
SP
Load Command
Velocity
This parameter should be loaded with the
desired maximum profile velocity in position
mode. This value should be selected to not
exceed the capabilities of the mechanical
system. Additionally, this command sets the
maximum velocity value in "velocity mode".
SP 3000
AC
Load Command
Acceleration
This parameter determines the acceleration and
deceleration rate to be calculated by the profiler
during execution. Argument in rpm/s
2
(Allowed value: 0 to 20000)
AC 100
V
Select Velocity Mode
Execution of this command causes the
controller to switch into the Velocity control
mode. The motor will ramp the selected velocity
at the rate defined by the AC parameter.
V 2200
HO
Define Home-Position
Define present position as zero
HO