7 open-drain outputs, 8 diode fault detection, 9 communicating with the lm86 – Rainbow Electronics LM86 User Manual
Page 10: 0 functional description
1.0 Functional Description
(Continued)
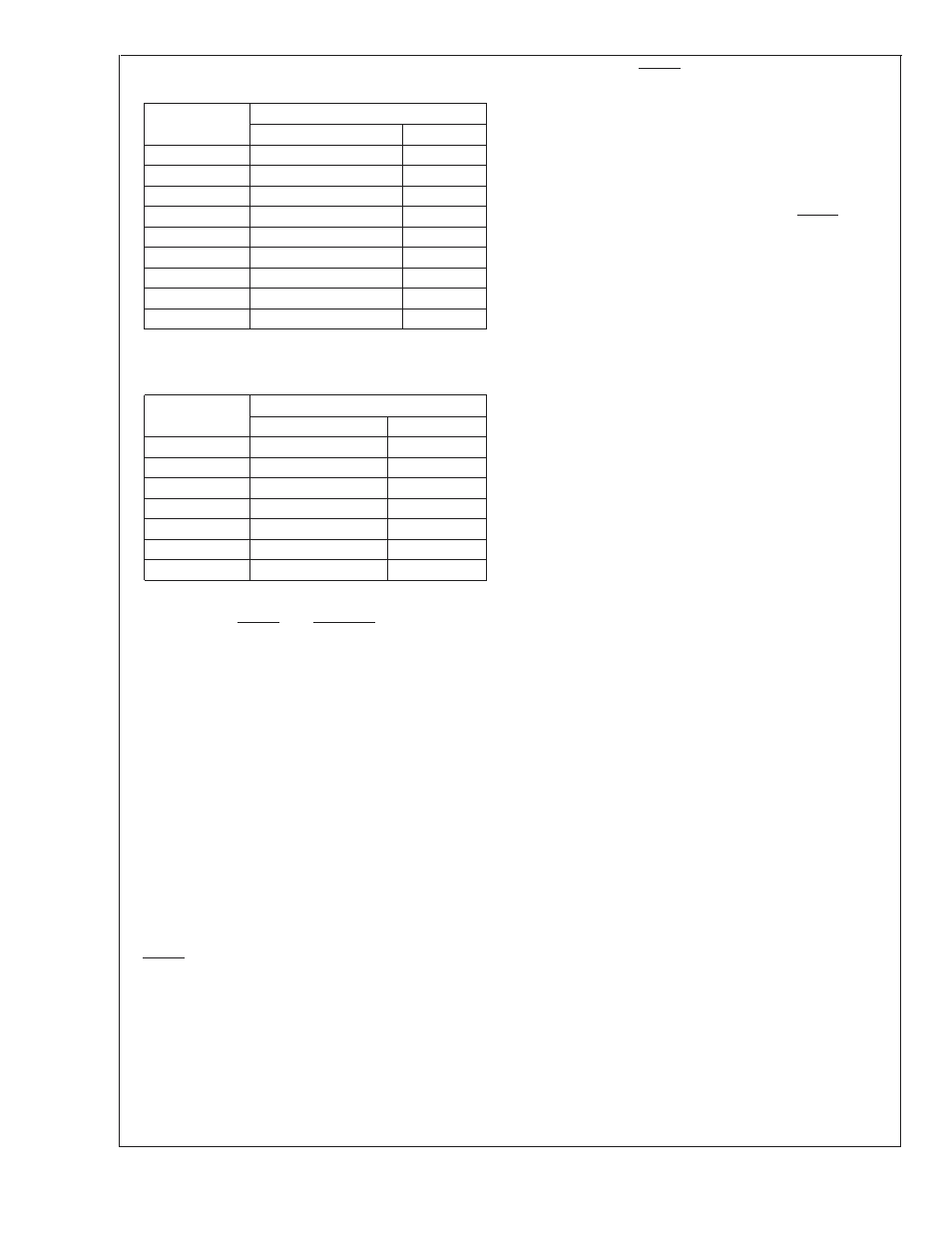
Temperature
Digital Output
Binary
Hex
+125˚C
0111 1101 0000 0000
7D00h
+25˚C
0001 1001 0000 0000
1900h
+1˚C
0000 0001 0000 0000
0100h
+0.125˚C
0000 0000 0010 0000
0020h
0˚C
0000 0000 0000 0000
0000h
−0.125˚C
1111 1111 1110 0000
FFE0h
−1˚C
1111 1111 0000 0000
FF00h
−25˚C
1110 0111 0000 0000
E700h
−55˚C
1100 1001 0000 0000
C900h
Local Temperature data is represented by an 8-bit, two’s
complement byte with an LSB (Least Significant Bit) equal to
1˚C:
Temperature
Digital Output
Binary
Hex
+125˚C
0111 1101
7Dh
+25˚C
0001 1001
19h
+1˚C
0000 0001
01h
0˚C
0000 0000
00h
−1˚C
1111 1111
FFh
−25˚C
1110 0111
E7h
−55˚C
1100 1001
C9h
1.7 OPEN-DRAIN OUTPUTS
The SMBData, ALERT and T_CRIT_A outputs are open-
drain outputs and do not have internal pull-ups. A “high” level
will not be observed on these pins until pull-up current is
provided by some external source, typically a pull-up resis-
tor. Choice of resistor value depends on many system fac-
tors but, in general, the pull-up resistor should be as large as
possible. This will minimize any internal temperature reading
errors due to internal heating of the LM86. The maximum
resistance of the pull-up to provide a 2.1V high level, based
on LM86 specification for High Level Output Current with the
supply voltage at 3.0V, is 82k
Ω(5%) or 88.7kΩ(1%).
1.8 DIODE FAULT DETECTION
The LM86 is equipped with operational circuitry designed to
detect fault conditions concerning the remote diode. In the
event that the D+ pin is detected as shorted to V
DD
or
floating, the Remote Temperature High Byte (RTHB) register
is loaded with +127˚C, the Remote Temperature Low Byte
(RTLB) register is loaded with 0, and the OPEN bit (D2) in
the status register is set. As a result, if the Remote T_CRIT
setpoint register (RCS) is set to a value less than +127˚C the
ALERT and T_Crit output pins will be pulled low, if the Alert
Mask and T_Crit Mask are disabled. If the Remote HIGH
Setpoint High Byte Register (RHSHB) is set to a value less
than +127˚C then ALERT will be pulled low, if the Alert Mask
is disabled. The OPEN bit itself will not trigger and ALERT.
In the event that the D+ pin is shorted to ground or D−, the
Remote Temperature High Byte (RTHB) register is loaded
with −128˚C (1000 0000) and the OPEN bit (D2) in the status
register will not be set. Since operating the LM86 at −128˚C
is beyond it’s operational limits, this temperature reading
represents this shorted fault condition. If the value in the
Remote Low Setpoint High Byte Register (RLSHB) is more
than −128˚C and the Alert Mask is disabled, ALERT will be
pulled low.
Remote diode temperature sensors that have been previ-
ously released and are competitive with the LM86 output a
code of 0˚C if the external diode is short-circuited. This
change is an improvement that allows a reading of 0˚C to be
truly interpreted as a genuine 0˚C reading and not a fault
condition.
1.9 COMMUNICATING with the LM86
The data registers in the LM86 are selected by the Com-
mand Register. At power-up the Command Register is set to
“00”, the location for the Read Local Temperature Register.
The Command Register latches the last location it was set
to. Each data register in the LM86 falls into one of four types
of user accessibility:
1.
Read only
2.
Write only
3.
Read/Write same address
4.
Read/Write different address
A Write to the LM86 will always include the address byte and
the command byte. A write to any register requires one data
byte.
Reading the LM86 can take place either of two ways:
1.
If the location latched in the Command Register is cor-
rect (most of the time it is expected that the Command
Register will point to one of the Read Temperature Reg-
isters because that will be the data most frequently read
from the LM86), then the read can simply consist of an
address byte, followed by retrieving the data byte.
2.
If the Command Register needs to be set, then an
address byte, command byte, repeat start, and another
address byte will accomplish a read.
The data byte has the most significant bit first. At the end of
a read, the LM86 can accept either acknowledge or No
Acknowledge from the Master (No Acknowledge is typically
used as a signal for the slave that the Master has read its
last byte). It takes the LM86 31.25ms to measure the tem-
perature of the remote diode and internal diode. When re-
trieving all 10 bits from a previous remote diode temperature
measurement, the master must insure that all 10 bits are
from the same temperature conversion. This may be
achieved by using one-shot mode or by setting the conver-
sion rate and monitoring the busy bit such that no conversion
occurs in between reading the MSB and LSB of the last
temperature conversion.
LM86
www.national.com
10