Toshiba VF-nC1 User Manual
Page 59
E6581090
E-7
5
5.8
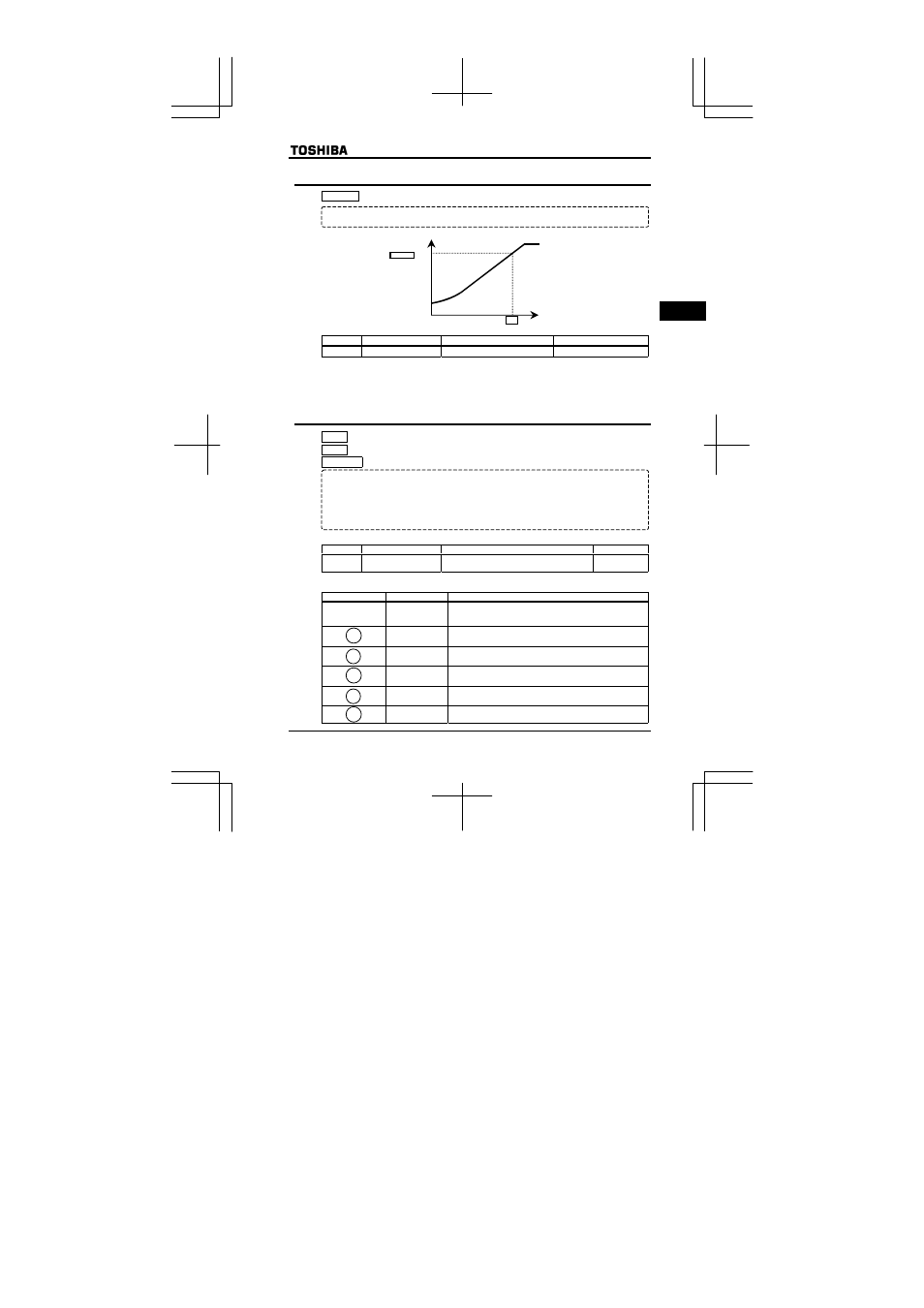
Base frequency
XN : Base frequency 1 (Hz)
Note: This is an important parameter that determines the constant torque control area.
Ou
tput v
ol
tage
[V
]
Base frequency
voltage
H
Output frequency (Hz)
XN
0
■
Parameter setting
Title
Function
Adjustment range
Default setting
XN
Base frequency 1 (Hz) 25~200 (Hz)
*
When operating the inverter with RV selected, change the setting of H to the value printed on
the rating plate, in addition to the setting of XN.
* The value is changed according to the set-up parameter condition.
(VFNC1 (S)-□□□□P□-W type)
60 [Hz] for VFNC1 (S)-□□□□P□ type.
5.9
Selecting control mode
RV : V/F control mode selection
XD : Torque boost 1 (%)
H : Slip frequency gain
■
Parameter setting
Title
Function
Adjustment range
Default setting
RV
V/F control mode
selection
0 (1,2): V/F constant
3: Sensorless vector control
0
Follow the steps below to set the RV parameter.
(Example: Setting the V/F control mode selection parameter (RV) to 3 (Vector control))
Key operated
LED display
Operation
Displays the operation frequency (operation stopped).
(When standard monitor display selection H= is set
to 0 [operation frequency]).
CWJ
The first basic parameter "History (CWJ)" is displayed.
RV
Switch to the control mode selection parameter (RV) by
pressing the △ key.
Press the ENTER key to display the parameter setting.
(Default setting: 0 (V/F))
Change the setting to 3 (Vector control) by pressing the △
key.
⇔RV
Press the ENTER key to save the new setting. RV and the
parameter setting “3” are displayed alternately.
• Function
Sets the base frequency in conformance with load specifications or the motor's rated frequency.
• Function
With VF-nC1, the V/F controls shown below can be selected.
x
V/F constant
x
Vector control
* When torque is not produced enough at low speeds, adjust the rotational speed using
the torque boost parameter. To correct the slip frequency, use the H parameter
(slip correction gain).
▲
ENT
▲
ENT
ENT
* A voltage higher than the voltage
set with H is applied to the
motor at a frequency higher than
the base frequency set with XN,
even if the H parameter is
set at a voltage lower than the
input voltage.